[DSP] W01 - Complex Exponential
oscillations
- oscillations are everywhere
- sustainable dynamic systems are always oscillatory
- things that don’t move in circles don’t last
- bombs
- rockets
- human beings (only partially oscillatory)
clip: gyroscopic stability of a disc player in zero-gravity - OFF vs. ON
- an oscillation is cyclic, it goes around in circles
- all oscillations can be described with a combination of cosine and sine functions
representing an oscillation
- a complex reference system centered on the origin of the oscillation is used for this
- a complex exponential is used to describe the position on the plane of oscillation
- \(x(t) = \exp(j\omega t)\), where \( \exp(j\omega t)\) is the complex exponential
- \(j = \sqrt{-1}\)
- \(\omega \): rotation/oscillation frequency
- \(t\): physical domain time
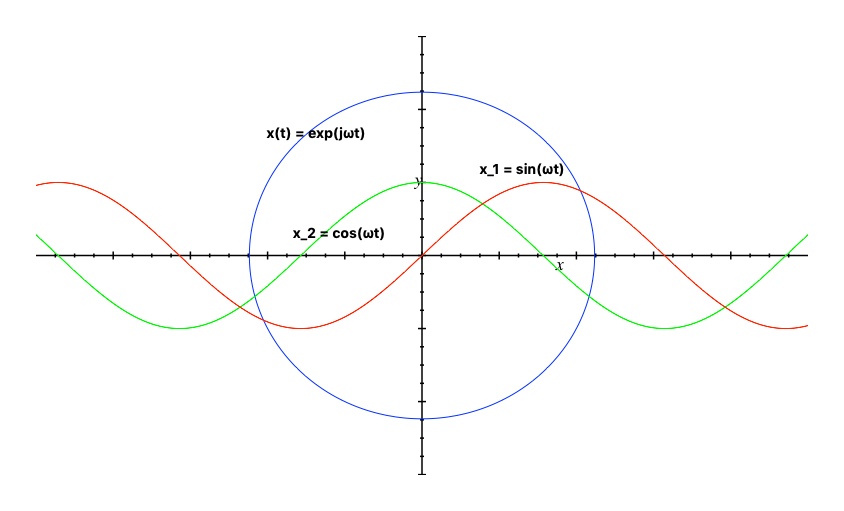
fig: complex exponential in complex plane with sin and cos functions
- trigonometric expansion of complex exponential:
- \(x(t) = \exp(j\omega t) = \cos(\omega t) + j \sin(\omega t)\)
- called euler’s formula
sample notation with complex exponential
- \(x[n]\): discretized sample notation
- complex exponential sample notation
- \( x[n] = A\exp(j(\omega n + \phi)) \)
- trigonometric complex sample notation
- \( x[n] = A [ \cos(\omega n + \phi) + j\sin(\omega n + \phi)] \)
- where:
- \( \omega \): frequency (radians)
- \( \phi \): initial phase (radians)
- \( A \): amplitude
- note that phase and frequency are both in radians when using the complex exponential paradigm
complex exponential notation
justification for use in dsp
- every sinusoid can be written as a sum of the sine and cosine
- sine and cosine live together
- trigonometry becomes algebra, so notation is simpler
- helps avoiding the use of trigonometric identities
- significantly reduces the number of terms in equations
- phase can be managed with exponent summation and split rule
- phase shifts are simple complex multiplications
- helps avoiding the use of trigonometric identities
- complex numbers can be used in digital systems without obstacles
anatomy of the complex exponential
- polar form of complex exponential:
- \( e^{j \alpha} = \cos \alpha + j \sin \alpha \)
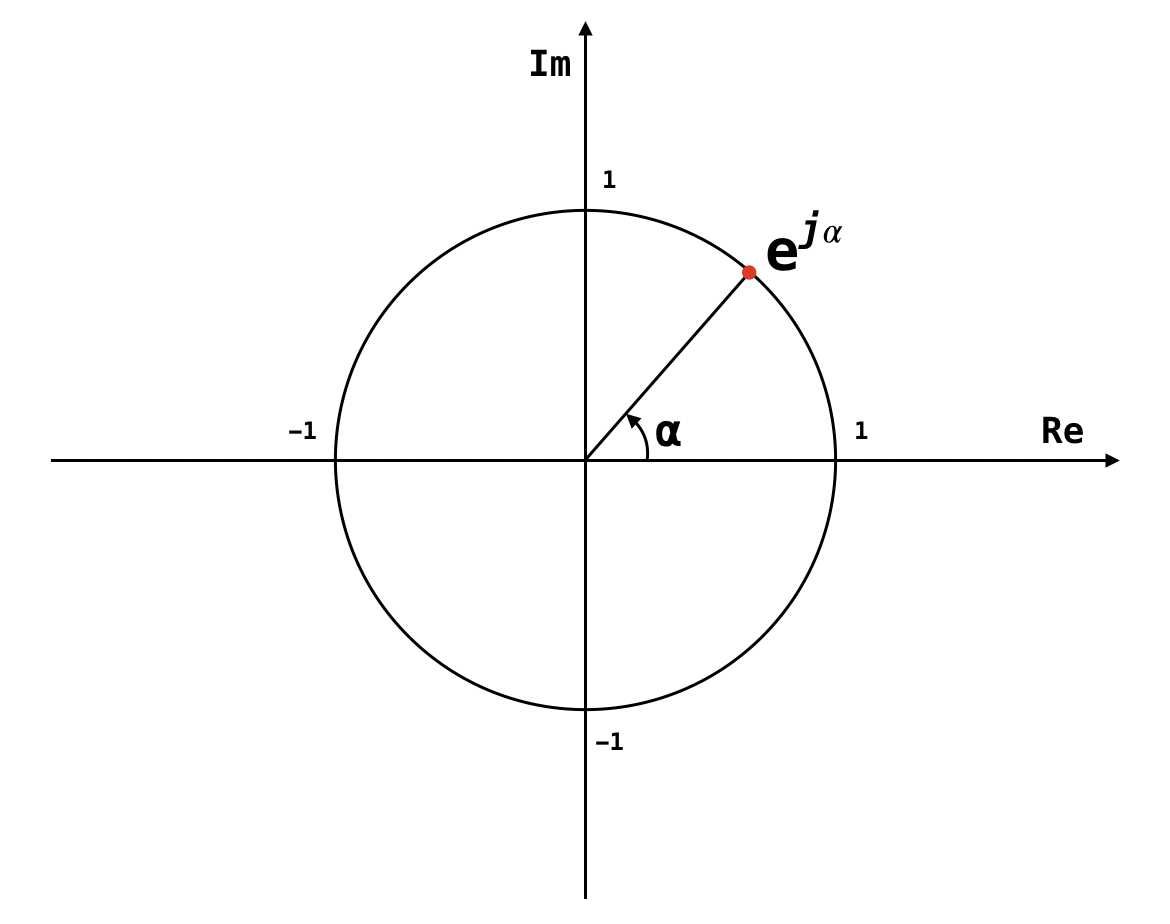
fig: \( e^{j \alpha}\) on the complex plane (argand diagram)
- \( e^{j \alpha} \) is a unit circle on the complex plane
- unit circle: \( \lvert e^{j \alpha} \rvert = 1\)
rotation about the origin complex plane
- say \( z \) is a point on the complex plane
- by multiplying it with \( e^{j \alpha} \)
- \( z \) is rotated about the origin
- in the anti-clockwise direction by amount \(\alpha\)
- about the origin
- with radius of rotation \( = \lvert z \rvert \)
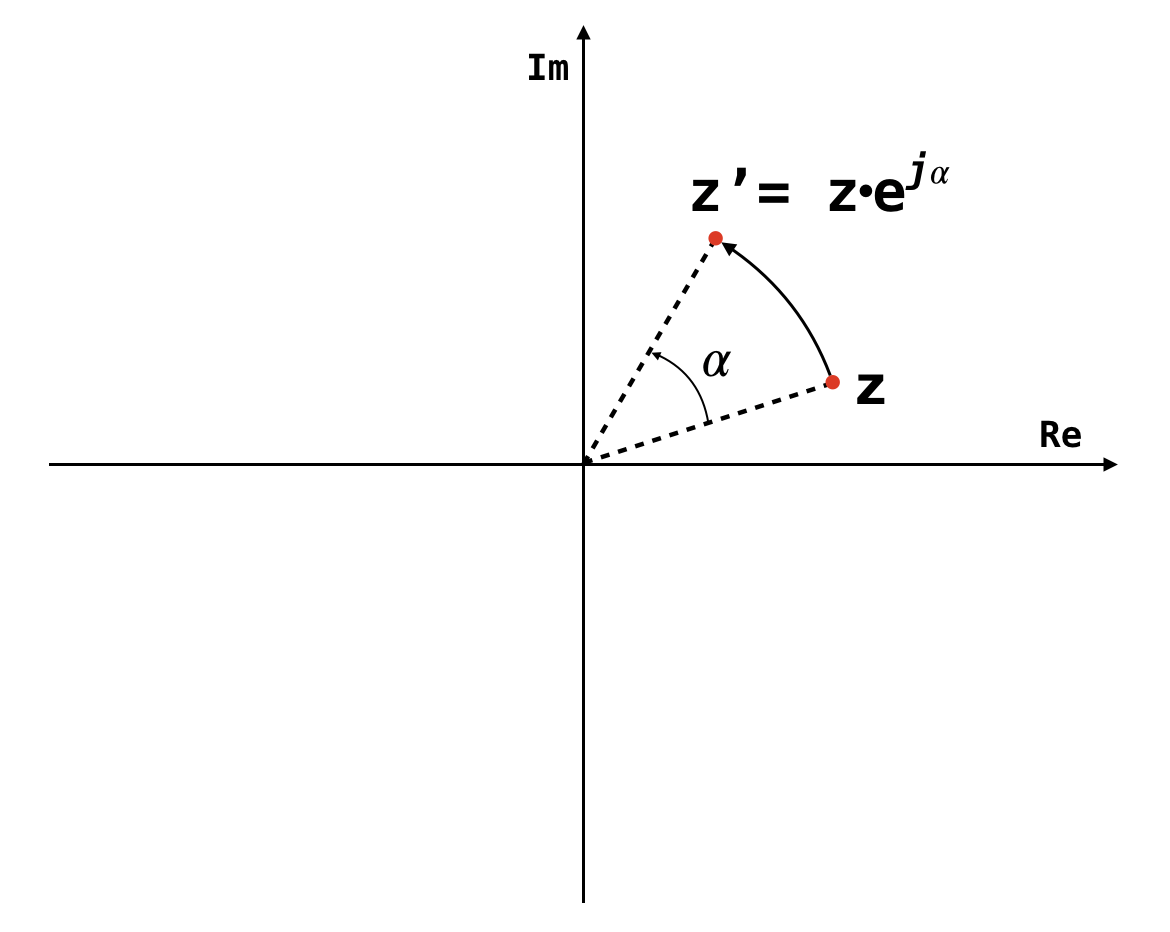
fig: rotation by multiplication with \( e^{j \alpha}\)
- this rotation operation is the basis of the complex exponential generating algorithm
- used to synthesize signals
- \(x[n] = e^{j \omega} \)
- \(x[n+1] = e^{j \omega}x[n] \)
- \(x[0] = 1\)
- with an initial phase:
- \(x[n] = e^{j \omega + \phi} \)
- \(x[n+1] = e^{j \omega}x[n] \)
- \(x[0] = e^{j \phi}\)
- used to synthesize signals
- in discrete time, a sinusoid \( e^{j\omega n} \) is periodic only if:
- \(\omega = \frac{M}{N}2\pi\); \(M,N \in \mathbb{N}\)
- i.e. only if:
- frequency, \(\omega \), is a rational multiple of \( 2\pi \)
- or equivalently, if \(e^{j\omega N} = 1\)
- so not every sinusoid is periodic in discrete time
aliasing
- the same point in the unit circle may have many names:
- the point at \(e^{j\alpha}\) can
- \(e^{2\pi + j\alpha}\)
- \(e^{6\pi + j\alpha}\)
- \(e^{-2\pi + j\alpha}\)
- the point at \(e^{j\alpha}\) can
- this is called aliasing
- natural property of complex exponential
-
in discrete time, this limits how fast we can go around the unit circle with a discrete-time signal
- the frequency of the discrete-time machine is limited
- \(0 \leq \omega < 2\pi\)
- when it is faster than \(2\pi\), due to the periodicity of the complex exponential,
- we fall back via a modulo operation
- even within the range, care must be taken between backwards and forwards motion
- when \(\omega = \pi \),
- the point simply oscillates between \( 1 \) and \(-1\) on the unit circle
- when \(\omega > \pi\)
- it can also be view as rotation backwards to get that point
- it is shorter to get to that point in the backwards direction
- so anytime \(\omega > \pi\),
- it appears like a smaller step in the clockwise direction
- this reverse effect aliasing is even more pronounced when \(\omega\) is close to \(2\pi\)
- if \(\omega » \pi \), the rotating body appears stationary due to aliasing
- when \(\omega = \pi \),
- so at different frequencies, i.e. \(\omega \) values, aliasing introduces different artifacts of illusion
eigenvalues and eigenvectors
- almost all vectors change direction when they are multiplied by a matrix
- however, certain vectors are in the same direction even after multiplication with that matrix
- those certain vectors are eigenvectors
- since they are the in the same direction, multiplication with the matrix is like scaling the original vector
- the equivalent scaling factors are called eigenvalues
- consider equation: \( Ax = \lambda x \)
- \(A\): square matrix
- \(\lambda\): eigenvalues of \(A\)
- \(x\): eigenvectors of \(A\)
- rearranging this, we get: \( A - \lambda I = 0\)
- from this we get A’s characteristic equation:
- \(\lvert A - \lambda I \rvert = 0\)
- where \(\lvert A \rvert\): determinant of matrix \(A\)
- the roots of this equation are eigenvalues \(\lambda\)
- from this we get A’s characteristic equation:
-
having computed the eigenvalues \(\lambda\), the eigenvectors \(x\) can be found using \( Ax = \lambda x \)
- if eigenvector elements can take on arbitrary values based on a relationship between them, make sure to normalize them with the square root of the sum of squares of all elements
- i.e. normalize it with the length (first modulus) of the vector