[DSP] W05 - Frequency Response of Filters
contents
- frequency domain
- denoising - frequency domain
- moving-average filter
- leaky-integrator filter
- karplus-strong algorithm
frequency domain
- filter impulse response is a time-domain attribute of a filter
- filters in the frequency domain are explored below
- if a complex exponential is processed with an LTI filter, the frequency of the phase doesn’t change
- the output signal may only have an amplitude change and/or a phase shift
- the frequency response of a filter is an important characteristic of a filter in the frequency domain
- the moving-average filter, leaky-integrator filter and the karplus-string algorithm will be explored in the frequency domain
eigen-sequences
- consider a complex exponential: ( e^{j\omega_0 n} )
- input this to a filter characterized by impulse response (h[n])
\[ h[n] = \mathcal{H} { \delta[n] }
] - output of a filter in terms of the impulse response (h[n]): \[ \begin{align} y[n] & = x[n] * h[n] \end{align} ]
- here: (x[n] = e^{j\omega_0 n} )
- so filter output can be written as:
\[ \begin{align}
y[n] & = e^{j\omega_0 n} h[n] _
& = h[n] e^{j\omega_0 n} _
_& = \sum{k = -\infty}^{\infty} h[k] e^{j\omega_0 (n - k)} & \rightarrow \text{ expansion of convolution } _
& = e^{j\omega_0 n} \sum{k = -\infty}^{\infty} h[k] e^{-j \omega_0 k} & \rightarrow \text{ input, scaled by a DTFT }
& = e^{j\omega_0 n} H(e^{j\omega_0}) & \rightarrow H(e^{j\omega_0}) = DTFT{h[n]}
\end{align} ] - here, the output of the filter is
- the input scaled by
- the DTFT @ the input signal frequency of the impulse response
- so, an LTI filter cannot change the frequency of the input
\[ e^{j \omega_0 n} H(e^{j \omega_0}) = \mathcal{H} { e^{j \omega_0 n} }
]
- in other words, complex exponentials are eigen-sequences of LTI systems
magnitude and phase
- consider a complex exponential input to an LTI filter
- expresssed as ( \mathcal{H} { e^{j \omega_0 n} } )
- the output is given by:
- ( \mathcal{H} { e^{j \omega_0 n} } = e^{j \omega_0 n} H(e^{j \omega_0}) )
- assume DTFT of filter impulse response ( H(e^{j \omega_0}) = Ae^{j \theta} )
- (A \in \mathbb{R})
- (\theta \in [-\pi,\pi])
- with this assumption, output of the LTI filter is: \[ \mathcal{H} { e^{j \omega_0 n} } = A e^{j(\omega_0 n + \theta}) ] - A: output amplitude - if ( A > 1 ): amplification - if ( 0 \leq A < 1 ): attentuation - (\theta): output phase shift - if ( \theta < 0 ): delay - if ( \theta > 0 ): advancement
convolution theorem
- answers the question:
- what is the DTFT of two sequences: \[ DTFT{x[n] * h[n]} = ? ]
- i.e. the DTFT of the output of a filter
- DTFT of (x[n]) shows
- how to build (x[n]) from a set of complex exponential basis functions
- any signal is made of infinitely many sinusoidal components of the form \[ X(e^{j \omega})e^{j \omega n} ]
- deriving the dTfT of convolution of two signals:
\[ \begin{align}
DTFT { x[n] h[n] } & = \sum{n=-\infty}^{\infty} (x_h)[n] e^{-j\omega n}
& = \sum_{n=-\infty}^{\infty} \sum_{k=-\infty}^{\infty} x[k] h[n-k] e^{-j\omega n}
& = \sum_{n=-\infty}^{\infty} \sum_{k=-\infty}^{\infty} x[k] h[n-k] e^{-j\omega (n-k)} e^{-j\omega k}
& = \sum_{k=-\infty}^{\infty} x[k] e^{-j\omega k} \sum_{n=-\infty}^{\infty} h[n-k] e^{-j\omega (n-k)}
& = H(e^{j\omega}) X(e^{j\omega}) \end{align} ]
- so the DTFT of a filter output is equal to the product of the input DTFT and the filter’s impulse response DTFT
- the DTFT of the impulse response is also called the frequency response of the filter
frequency response
- the fourier transform of filter impulse response is the frequency response of a filter
- DTFT of filter impulse response determines the frequency characteristic of a filter \[ H(e^{j\omega}) = DTFT { h[n] } ]
- magnitude and the phase response can be separately analysed
magnitude response
- amplification: ( \vert H(e^{j\omega}) \vert > 1 )
- attenuation: ( \vert H(e^{j\omega}) \vert < 1 )
phase response
- more complex to qualify
- overall delay and shape changes are quantified by the phase response
- allows to asses if filter will change the shape of the input or not
- DTFT of the output of a LTI filter is equal to the product of the DTFT of its input and the DTFT of its impulse response
denoising - frequency domain
- consider the scenario where a smooth signal is measured
- due to the measurement process, the measured value has a perturbation that affects the smoothness of the measured signal
- this leads to a noisy signal
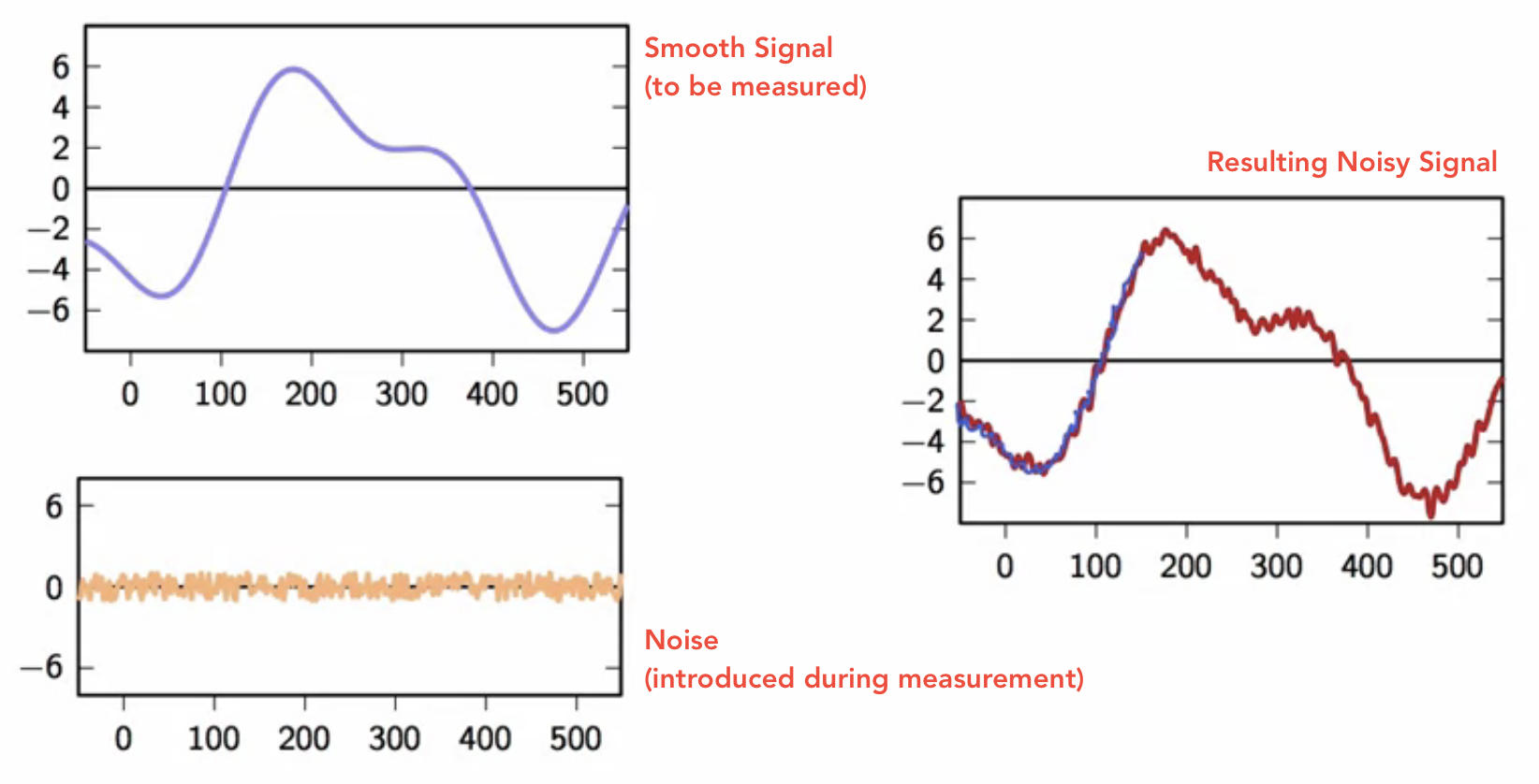
fig: noisy signal resulting from a measurement - time domain
- the noisy signal spectrum is analyzed in the frequency domain
magnitude analysis
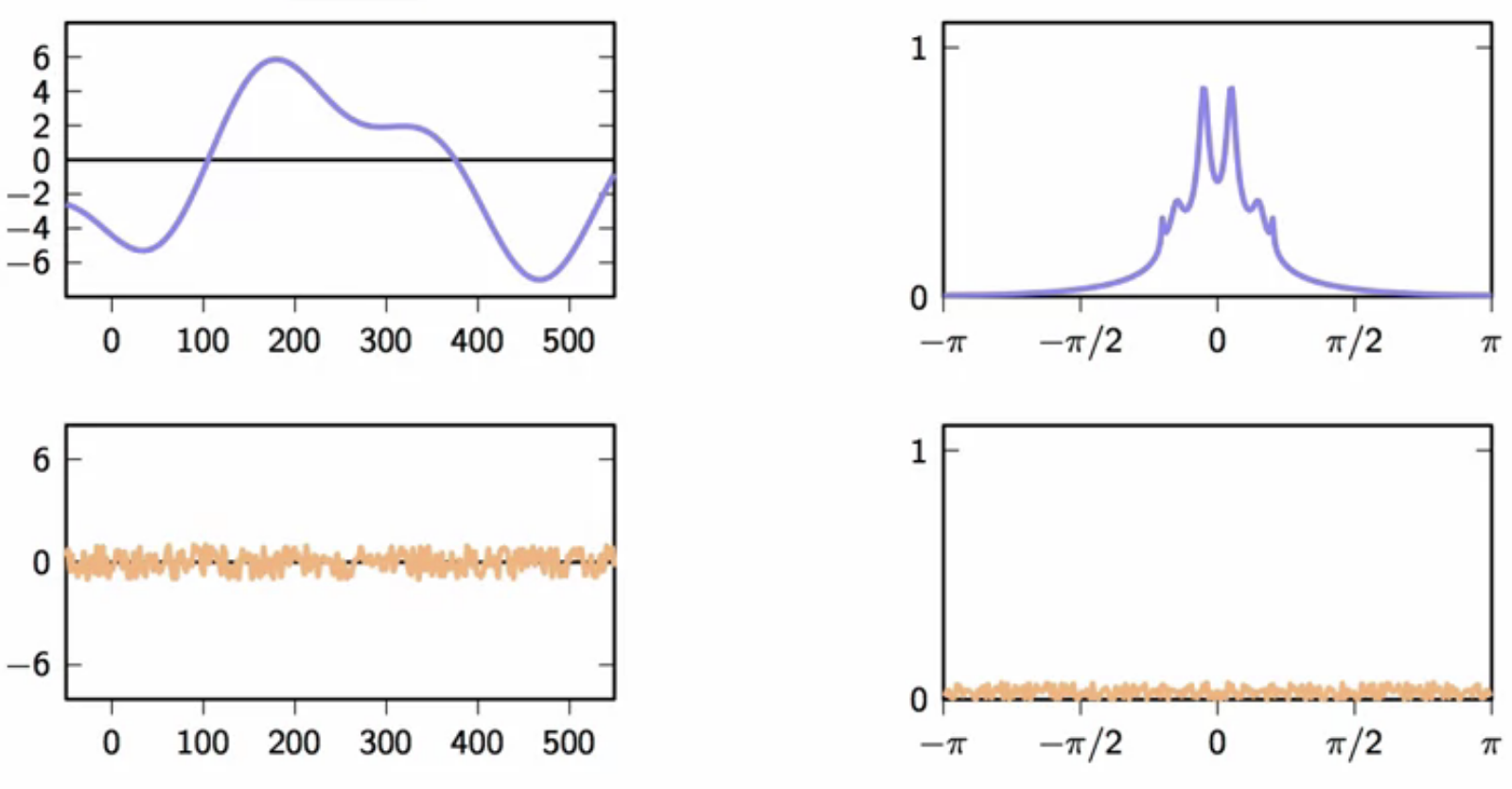
fig: left col - time domain; right col - frequency domain (DTFT)
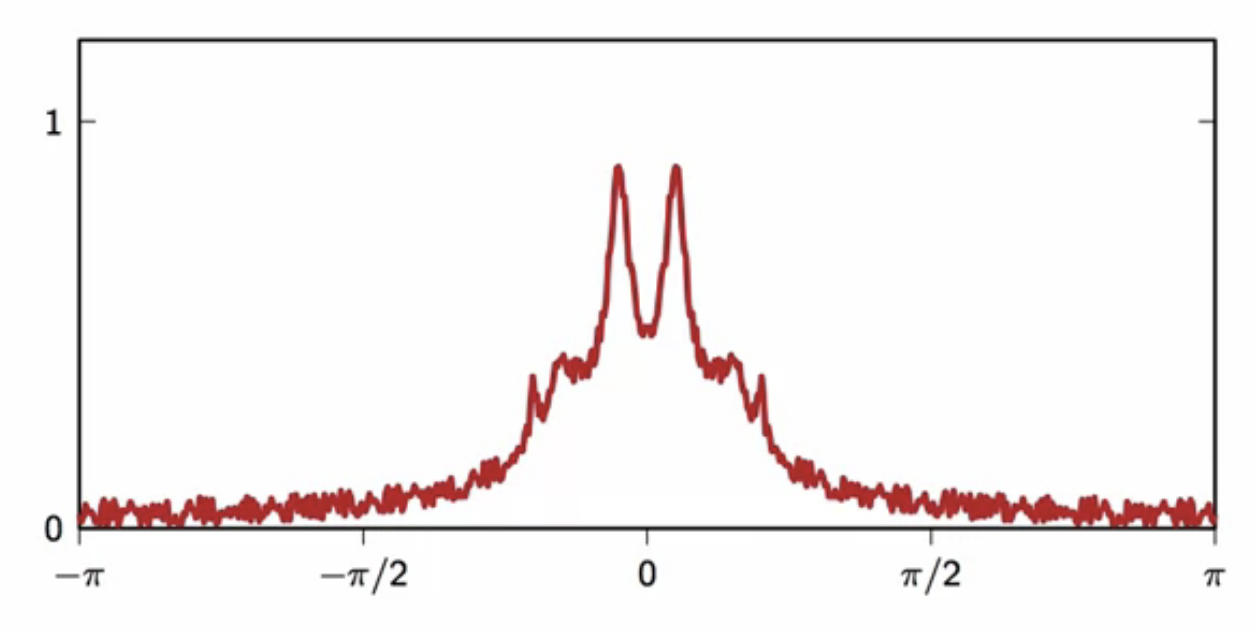
fig: frequency spectrum of noisy measured signal
phase analysis
- assume ( \vert H(e^{j \omega}) \vert = 1)
- this is the phase of the filter frequency response
- there are three different phase analysis cases:
- zero phase:
- ( \angle H(e^{j \omega}) = 0)
- spectrum is fully real
- linear phase
- ( \angle H(e^{j \omega}) = d\omega)
- phase is proportional to the frequency
- by a factor ( d \in mathbb{R})
- non-linear phase
- all other cases
- zero phase:
- when a linear phase is added to a signal, its shape remains the same
- it is shifted in time by the phase influenced amount
- linear: phase is proportional to the frequency
- when a non-linear phase is added to a signal, its shape changes
- non-linear: phase is not proportional to frequency
- the spectrum magnitude remains the same with phase changes
linear phase
- adding a phase is simply adding a delay to a signal
\[ \begin{align}
\mathcal{D} { x[n]} & = x[n - d]
y[n] & = x[n-d]
\end{align} ] - in the frequency domain:
[ \begin{align}
Y( e^{j \omega}) & = e^{-j \omega d} X(e^{j \omega})
H( e^{j \omega}) & = e^{-j \omega d} & \text{ phase }\propto \text{ } \omega \text{, by a factor of } d \end{align} ] - the proportionality constant (d) in the frequency domain is the same as number of samples of delay by the delay operator in the time domain
- this is why the phase change is linear
- this is also the reason why delay is inevitable in causal filters
moving-average filter
- the impulse response of the moving-average filter is \[ h[n] = (u[n] -u[n-M])/M ] fig: moving-average filter - impulse response
moving average - magnitude response
- the DTFT magnitude of the impulse response is
\[ \vert He^{j\omega} \vert = \frac{1}{M} \Bigg \vert \frac{sin(\frac{\omega}{2}M)}{sin(\frac{\omega}{2})} \Bigg \vert ]
- this magnitude is zero @ ( \omega = \frac{2\pi}{M} k ) when ( k \neq 0 )
fig: moving-average filter (M = 9) - impulse response DTFT (frequency response)
fig: moving-average filter (M = 20) - frequency response
fig: moving-average filter (M = 100) - frequency response
- in the frequency domain, when a moving-average filter is applied
- this above noisy spectrum is multiplied with the frequency response of the moving-average filter
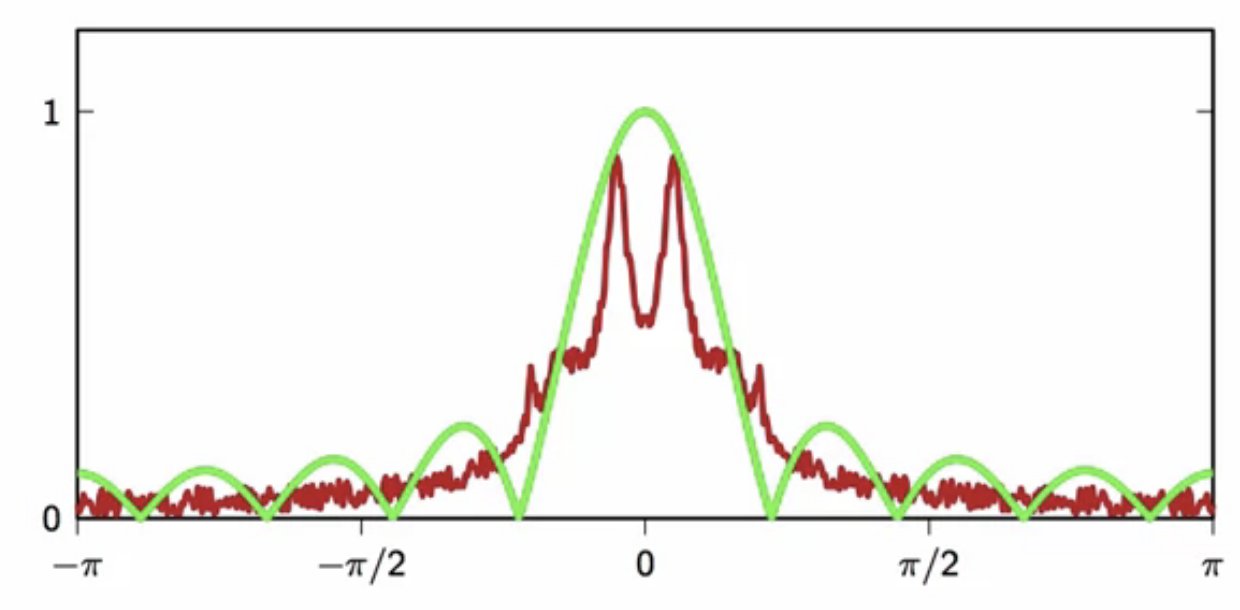
fig: noisy signal frequency spectrum overlaid with a 9-pt moving-average filter frequency spectrum
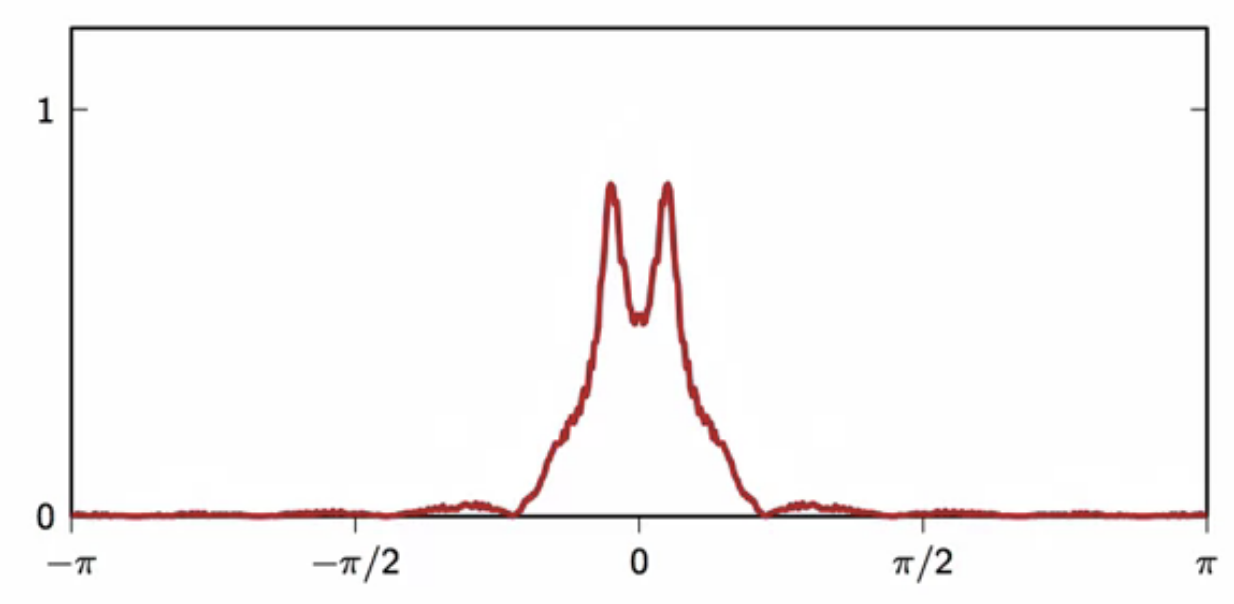
fig: product of noisy signal frequency spectrum with a 9-pt moving-average filter frequency spectrum
- this product indicates a high attenuation of high frequencies
- most of the noise contained in the high frequency band is eliminated
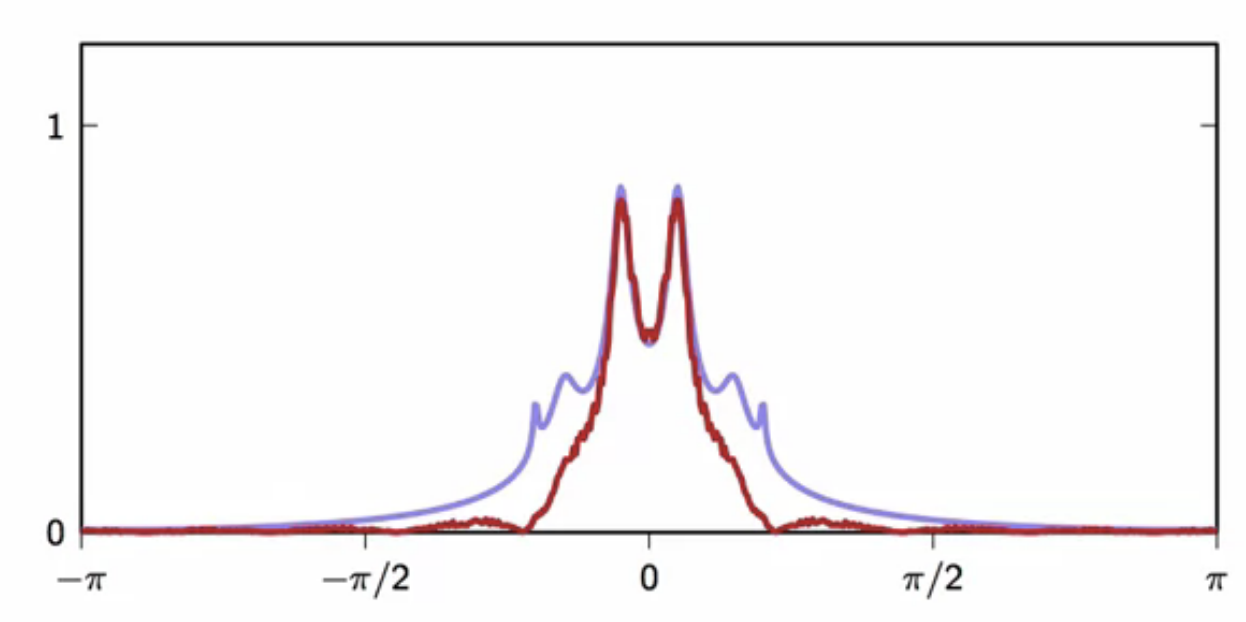
fig: original signal vs. filtered signal frequency spectrum
- some parts of the spectrum that carried useful information is also eliminated
- some useful information is lost in the process of removing noise
moving average - phase response
- moving average is a linear phase inducer
- moving-average filter frequency response including the phase is:
\[ H( e^{j \omega}) = \frac{1}{M} \frac{sin(\frac{\omega}{2}M)}{sin(\frac{\omega}{2})} e^{-j \frac{M-1}{2} \omega}
]
- here:
[ \begin{align}
\frac{1}{M} \frac{sin(\frac{\omega}{2}M)}{sin(\frac{\omega}{2})} & \text{: pure amplitude, real term}
e^{-j \frac{M-1}{2} \omega} & \text{: pure phase term}
d = \frac{M-1}{2} & \text{: half the length of the support in the impulse response}
\end{align} ]
- here:
[ \begin{align}
\frac{1}{M} \frac{sin(\frac{\omega}{2}M)}{sin(\frac{\omega}{2})} & \text{: pure amplitude, real term}
- half the length of the support in the impulse response is the delay introduced by the moving average

fig: moving-average filter response split into pure magnitude change, followed by pure phase change
[ \begin{align}
H( e^{j \omega}) & = A(e^{j \omega})e^{-j \omega d}
A(e^{j \omega}) & \in \mathbb{R}
A(e^{j \omega}) & \text{: pure amplitude term}
e^{-j \omega d} & \text{: pure phase term}
\end{align}
]
leaky-integrator filter
- the impulse response of the leaky-integrator filter
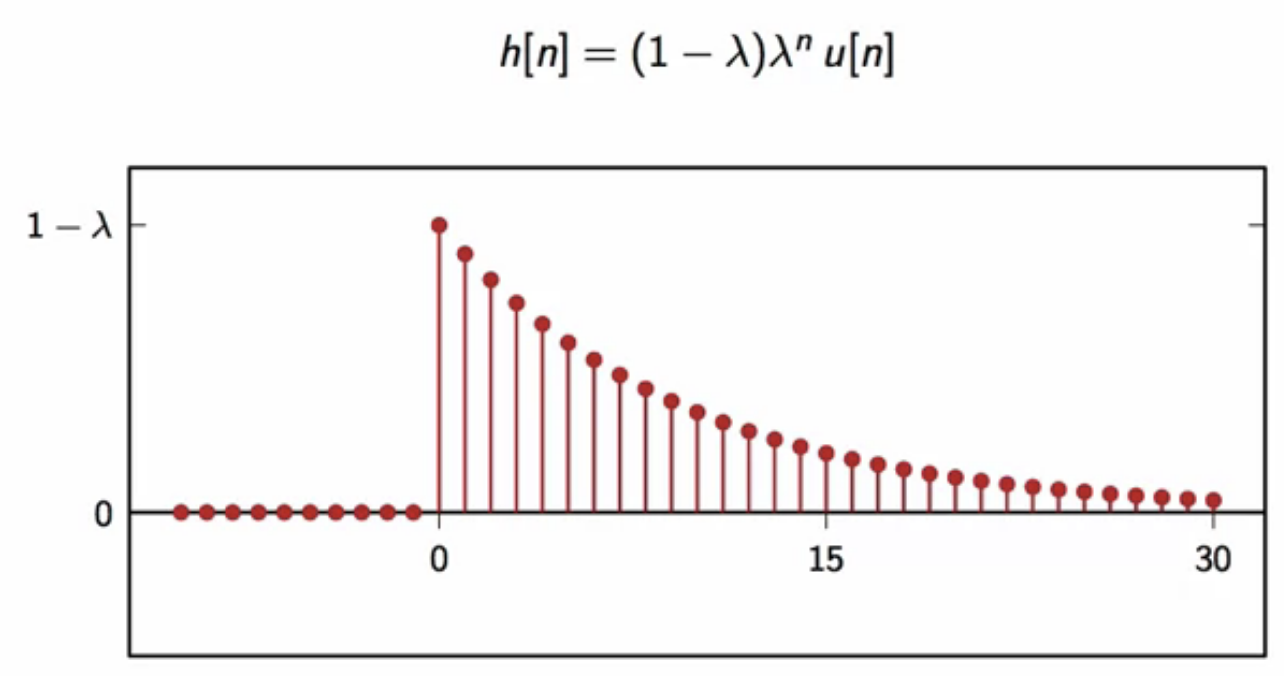 fig: leaky-integrator impulse response
fig: leaky-integrator impulse response
- exponentially decaying sequence
- fourier-transform of leaky-integrator impulse response is
\[ H( e^{j\omega} ) = \frac{1-\lambda}{1-\lambda e^{j\omega}} ]
complex algebra
[ \begin{align}
\frac{1}{a + jb} & = \frac{a - jb}{a^2 + b^2}
\end{align} ]
- so, if
[ \begin{align}
x & = \frac{1}{a + jb}
\end{align} ] - then
[ \begin{align}
\vert x^2 \vert & = \frac{1}{a^2 + b^2} & \rightarrow \text{ magnitude }
\angle x & = \tan^{-1} \Bigg [ -\frac{b}{a} \Bigg ] & \rightarrow \text{ phase }
\end{align} ]
leaky integrator fourier transform
- consider the leaky integrator fourier transform
[ \begin{align}
H( e^{j\omega} ) & = \frac{1-\lambda}{1-\lambda e^{j\omega}}
H( e^{j\omega} ) & = \frac{1-\lambda}{(1 - \lambda \cos \omega) - j \sin \omega}
(1 - \lambda \cos \omega) & \rightarrow \text{ real part of denominator }
\sin \omega & \rightarrow \text{ imaginary part of denominator }
\end{align} ] - applying complex algebra
[ \begin{align}
\vert H( e^{j\omega} ) \vert^2 & = \frac{(1-\lambda)^2}{1 - 2\lambda \cos \omega + \lambda^2} & \text{ squared magnitude }
\angle H( e^{j\omega} ) & = \tan^{-1} \Bigg [ \frac{\lambda \sin \omega}{(1 - \lambda \cos \omega)} \Bigg ] & \text{ non-linear phase }
\end{align} ]
leaky integrator - magnitude response
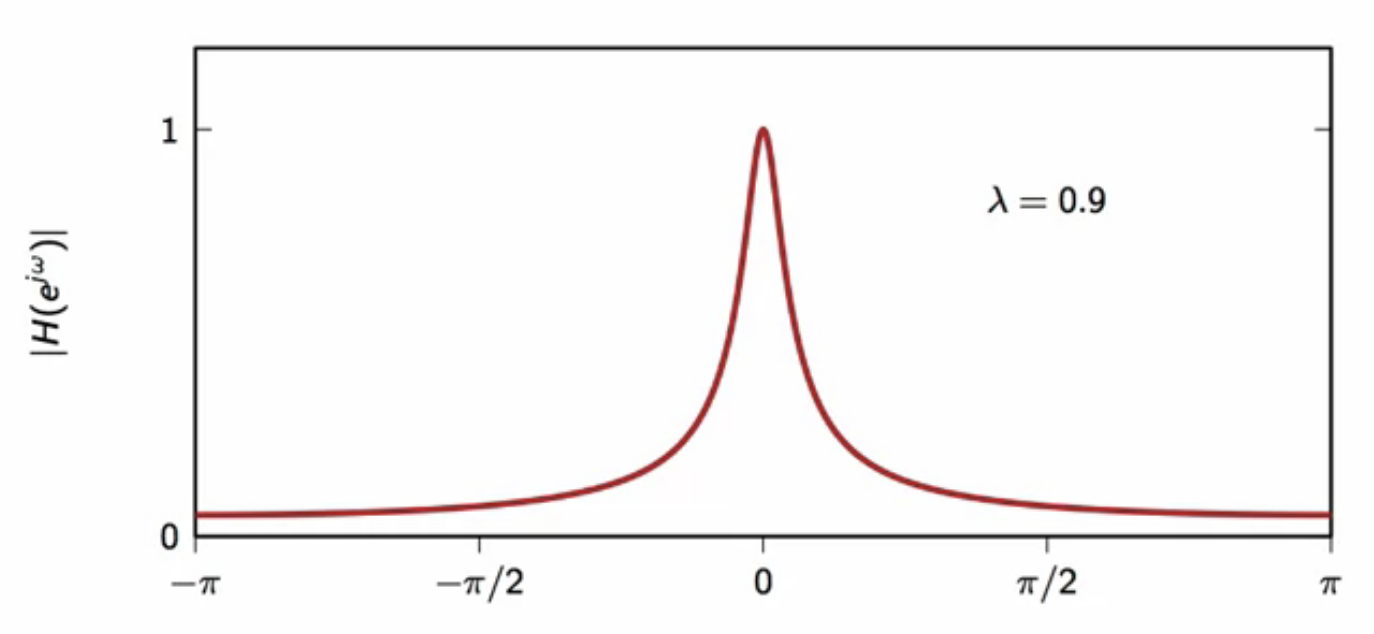
fig: leaky-integrator frequency response - magnitude (( \lambda = 0.9 ))
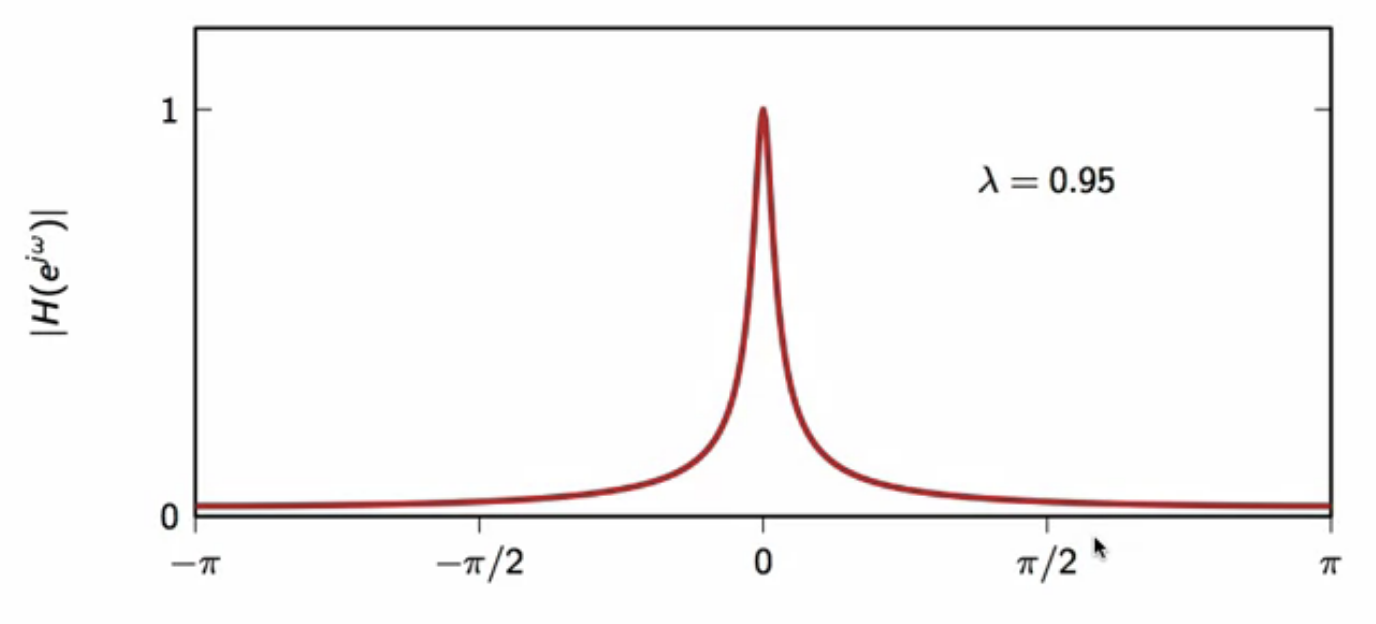
fig: leaky-integrator frequency response - magnitude (( \lambda = 0.95 ))
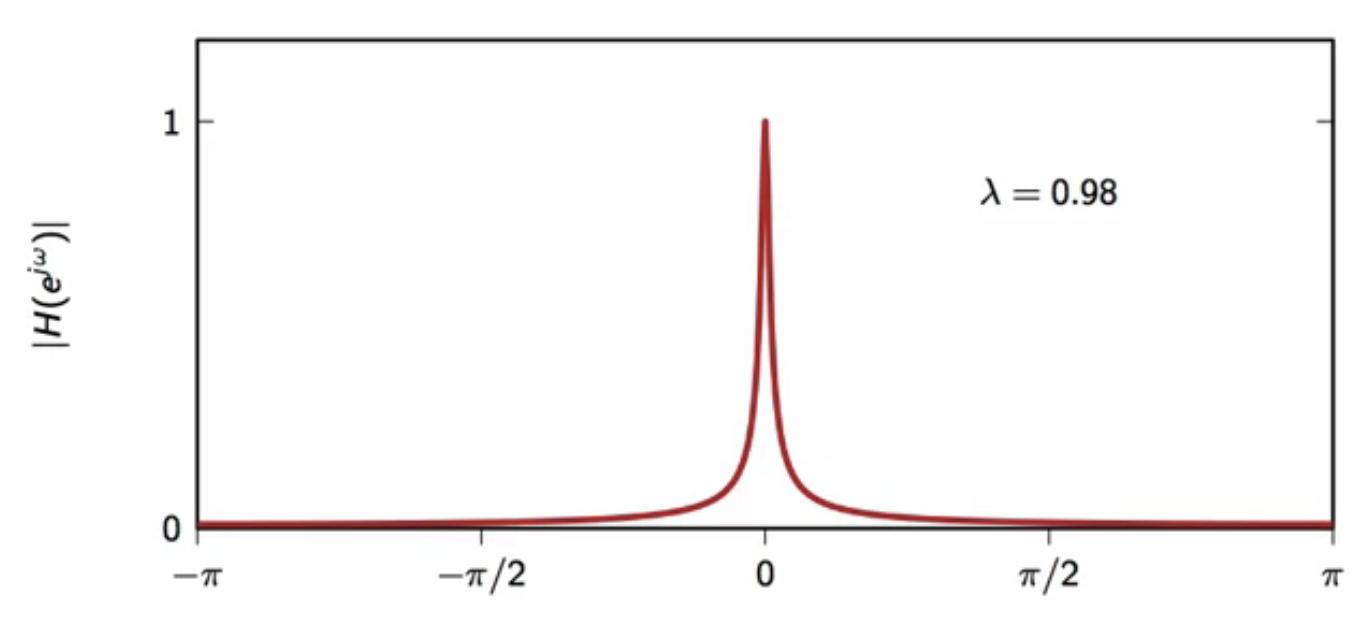
fig: leaky-integrator frequency response - magnitude (( \lambda = 0.98 ))
- characteristic is very similay to the moving average
- however no zeros
- monotonic and not oscilloscopic
- as (\lambda) goes closer to (1), the magnitude curve gets more concentrated around zero
- becomes similar to the moving-average filter magnitude response when ( \lambda ) is very close ot (1)
leaky integrator - phase response
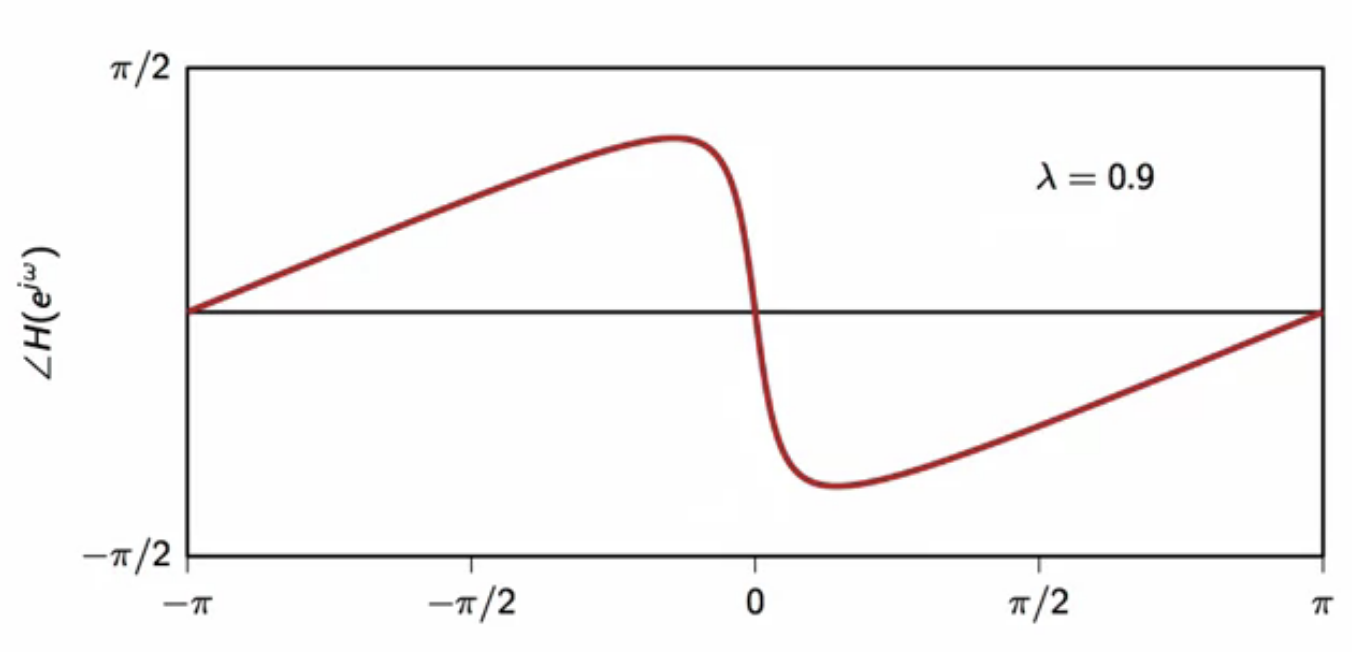
fig: leaky-integrator frequency response - phase (( \lambda = 0.9 ))
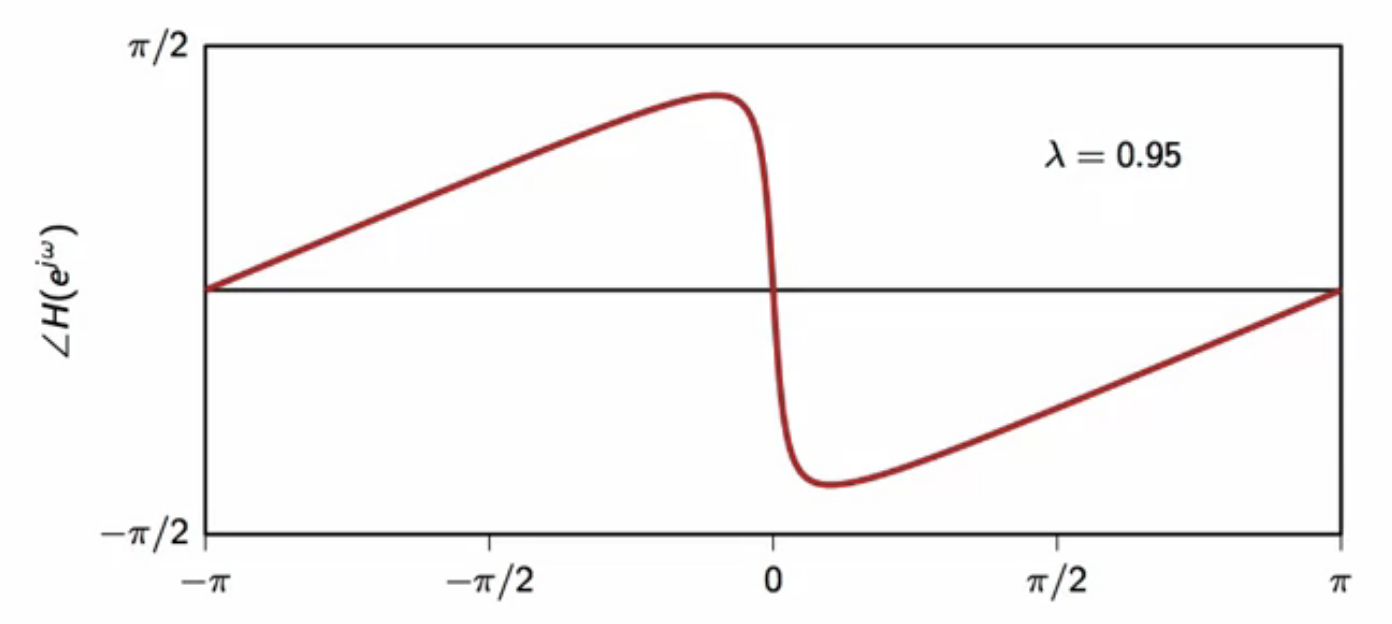
fig: leaky-integrator frequency response - phase (( \lambda = 0.95 ))
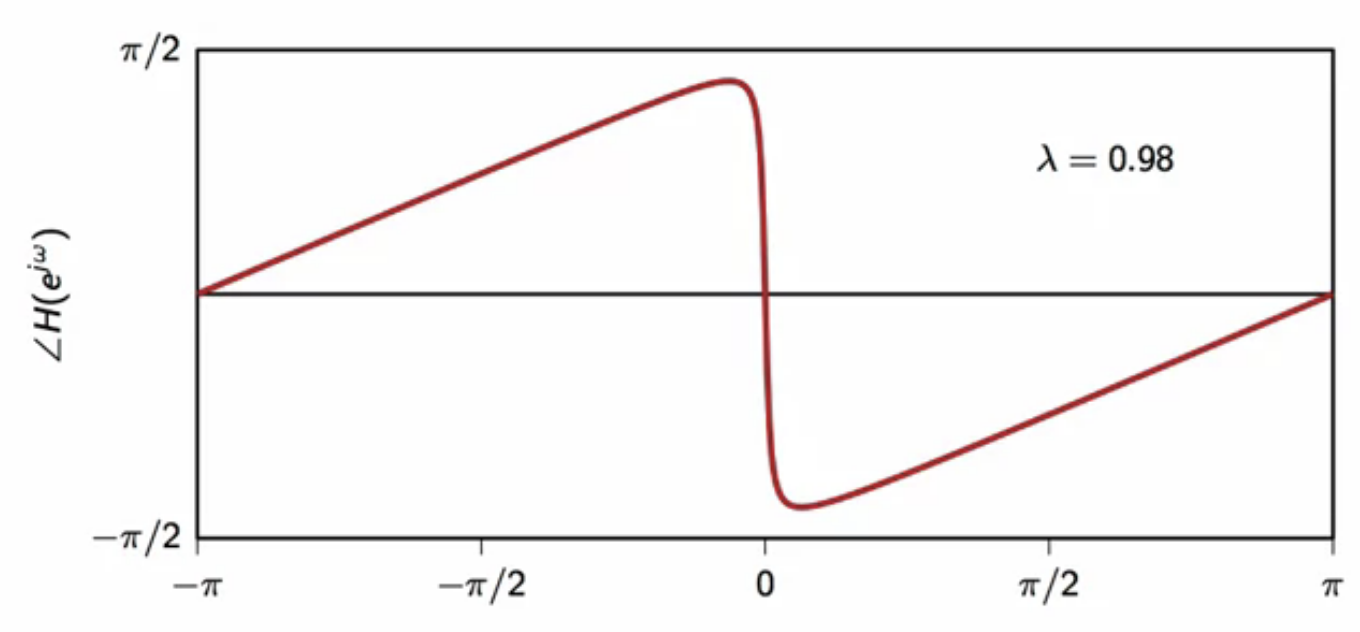
fig: leaky-integrator frequency response - phase (( \lambda = 0.98 ))
- non-linear characteristic
- as ( \lambda ) increases, the steepness of the phase curve increases
combined response
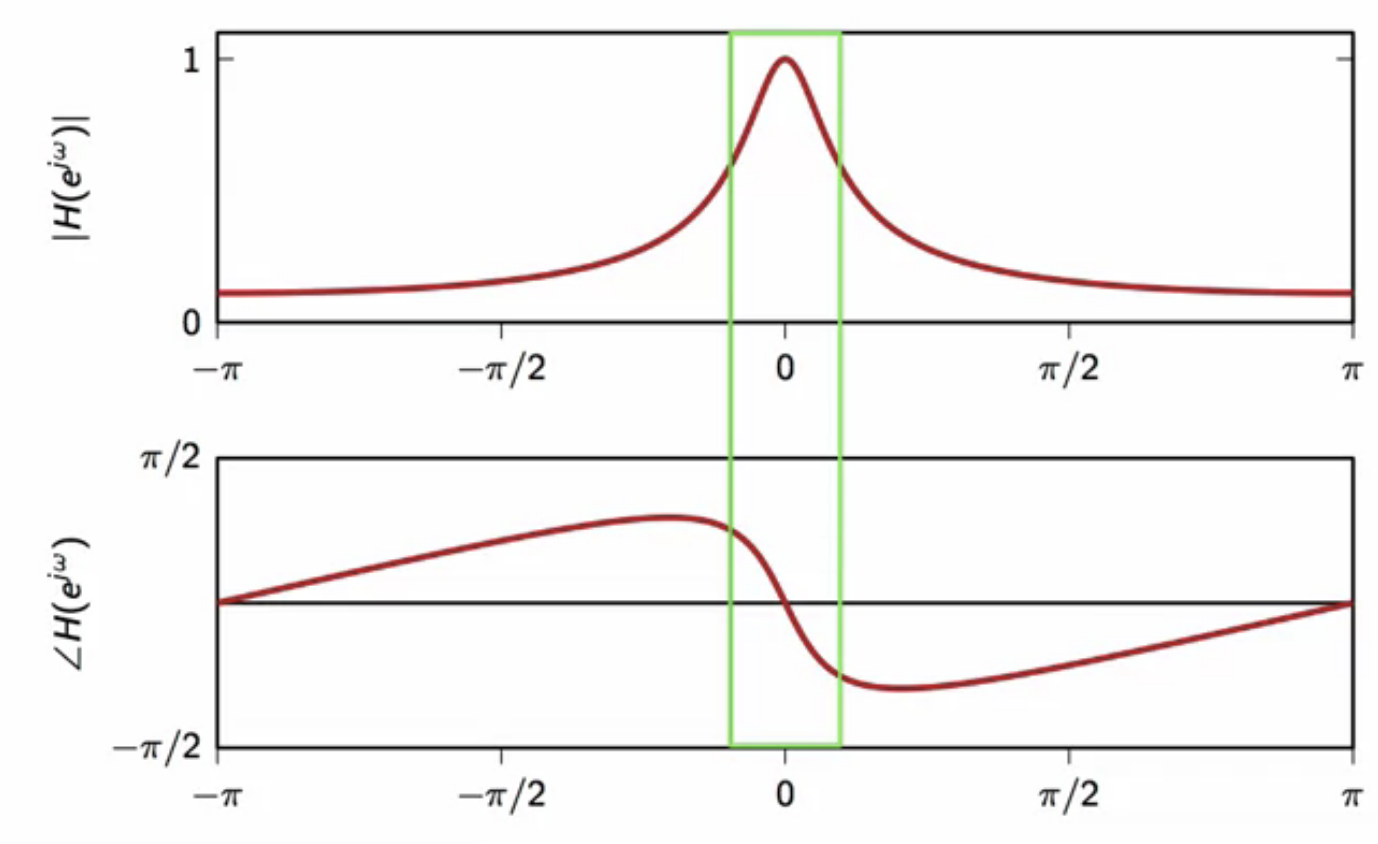
fig: linear part in the non-linear frequency response of a leaky integrator filter
- the part of the filter where the attenuation is not severe is linear
- so leaky integrator can be used without significant phase distortion
karplus-strong algorithm
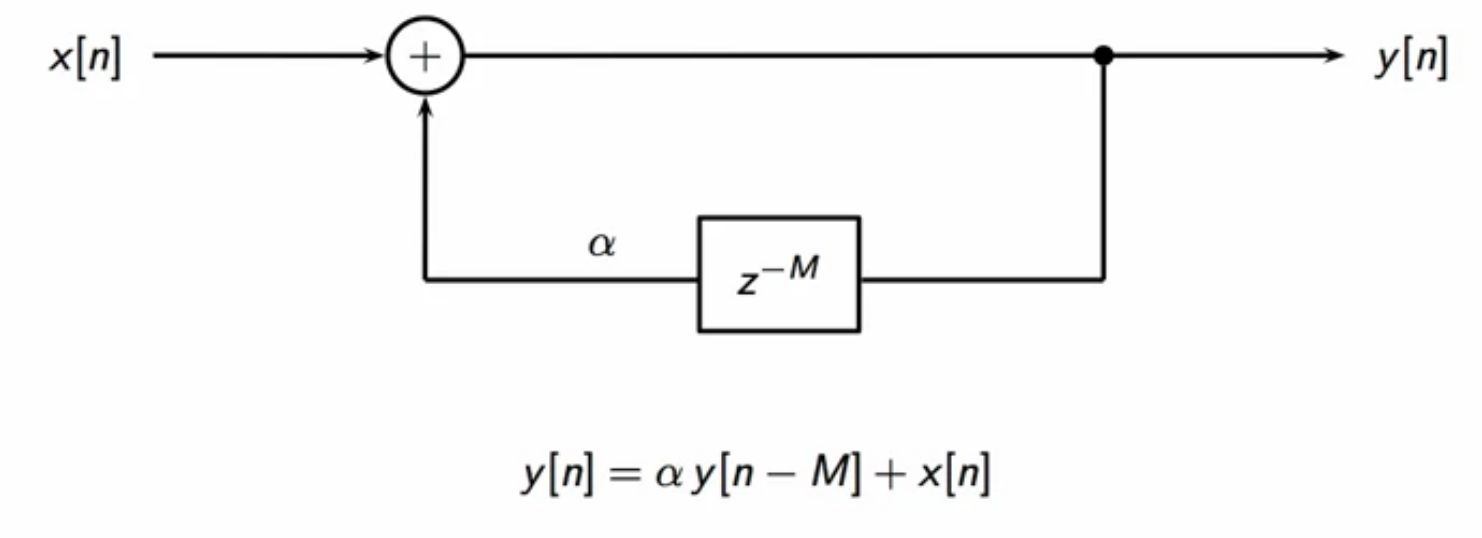
fig: karplus-strong signal generate algorithm
- this is initialized with a finite-support signal
- there is a feedback loop with a delay of (M) samples
- feedback is scaled by a factor (\alpha)
- if Karplus-Strong algorithm is initialized with one period of the saw-tooth wave, then the following output is obtained
- this is multiple repetitions of that period
- with decay scaling influenced by (\alpha)
convolution in k-s algorithm
- consider a staggered exponential sequence
\[ \begin{align}
w[n] = \Bigg { \begin{matrix} \alpha^k & \text{ for } n = kM\ 0 & \text{ otherwise }\end{matrix}
\end{align} ] - a series of exponentially decaying dirac-deltas - spaced (M) points apart - the karplus-strong algorithm can be considered a convolution
\[ \begin{align}
y[n] & = \bar{x}[n] * w[n]
\text{where: } &
\bar{x}[n] &: \text{ finite-support signal used to initialize the k-s algorithm }
w[n] &: \text{ a staggered exponential sequence }
\end{align} ] - the DTFT of this convolution gives
[ \begin{align}
Y( e^{j \omega} ) & = \bar{X}(e^{j \omega}) W(e^{j \omega})
\bar{X} &: \text{ fourier transform of saw-tooth initialization signal }
W(e^{j \omega}) &: \text{ fourier transform of staggered exponential sequence }
\end{align} ] - the DTFT of each component in the above equation is as follows:
[ \begin{align}
\bar{X} & = e^{ -j \omega } \Bigg ( \frac{M+1}{M-1} \Bigg ) \frac{ 1 - e^{-j(M-1)\omega} }{(1 - e^{ -j\omega })^2 } - \frac{1 - e^{-j(M + 1)\omega} }{(1 - e^{ -j\omega })^2}
W(e^{j \omega}) & = \frac{1}{1 - \alpha e^{-j\omega M}}
\end{align}
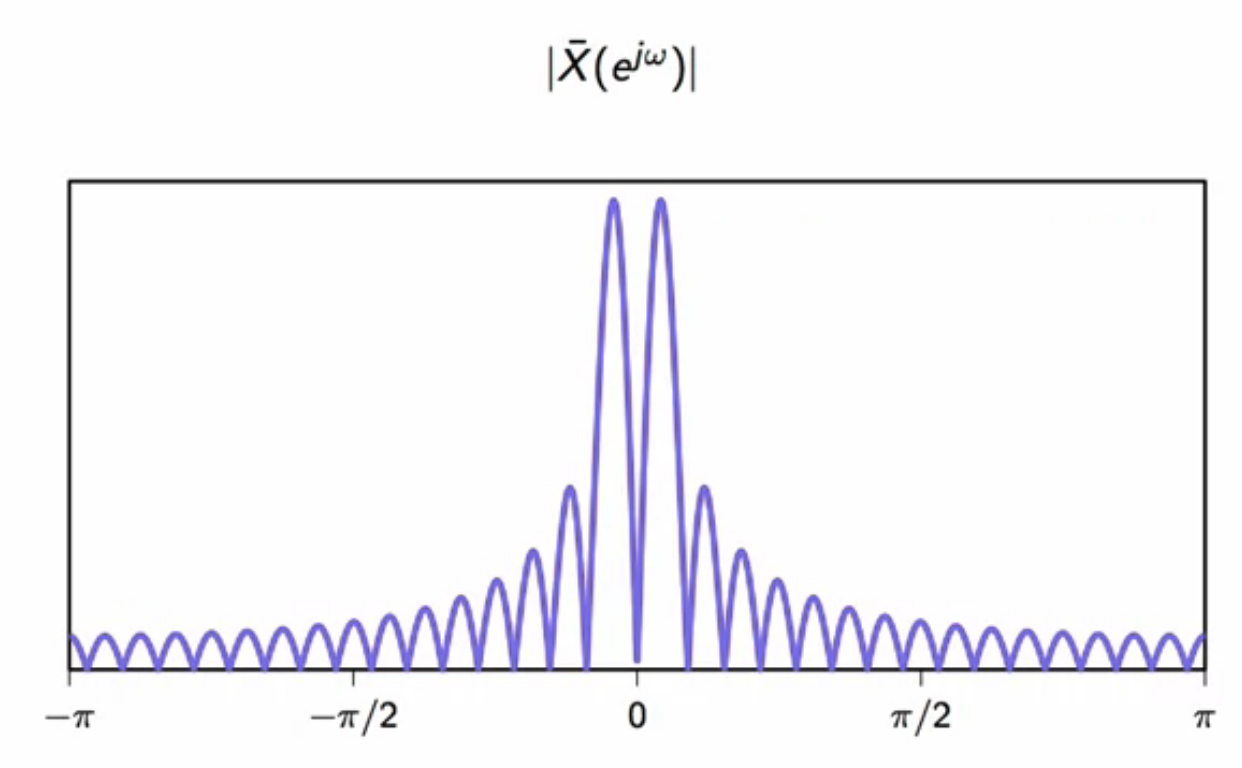
*fig: fourier transform of saw-tooth initialization wave*
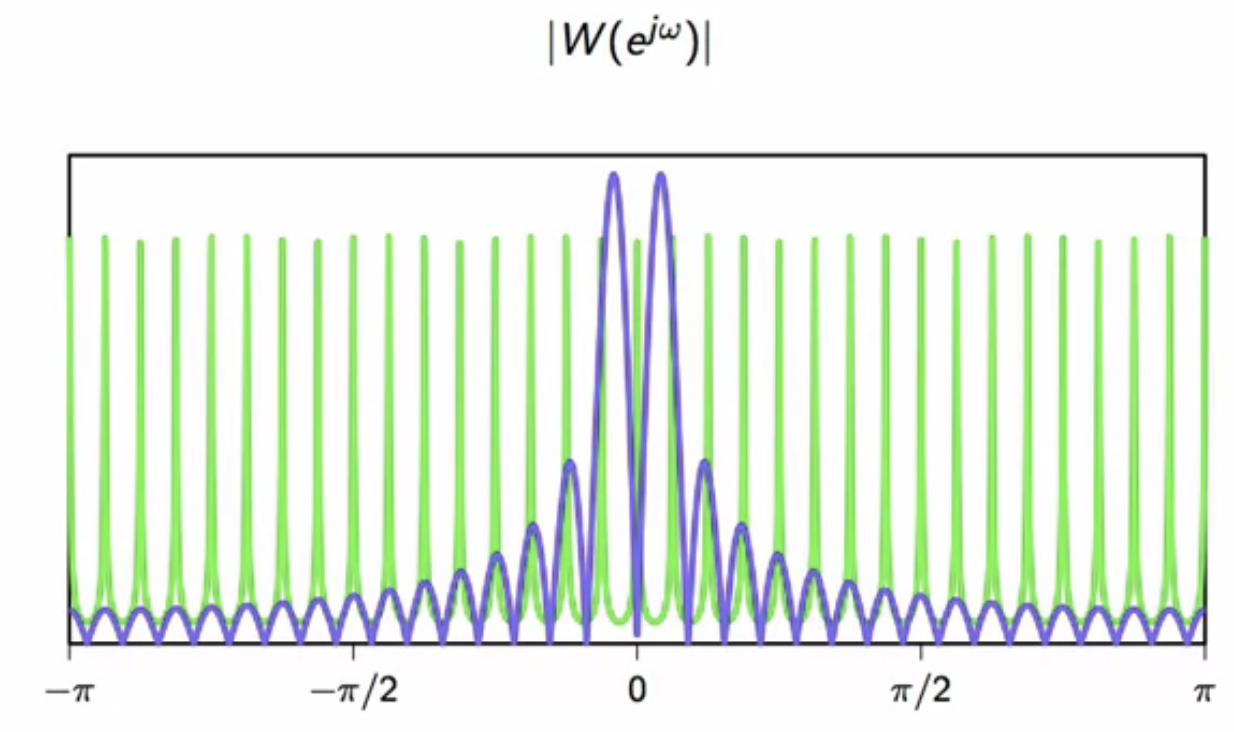
*fig: fourier transform of staggered exponential sequence overlaid on prev plot*
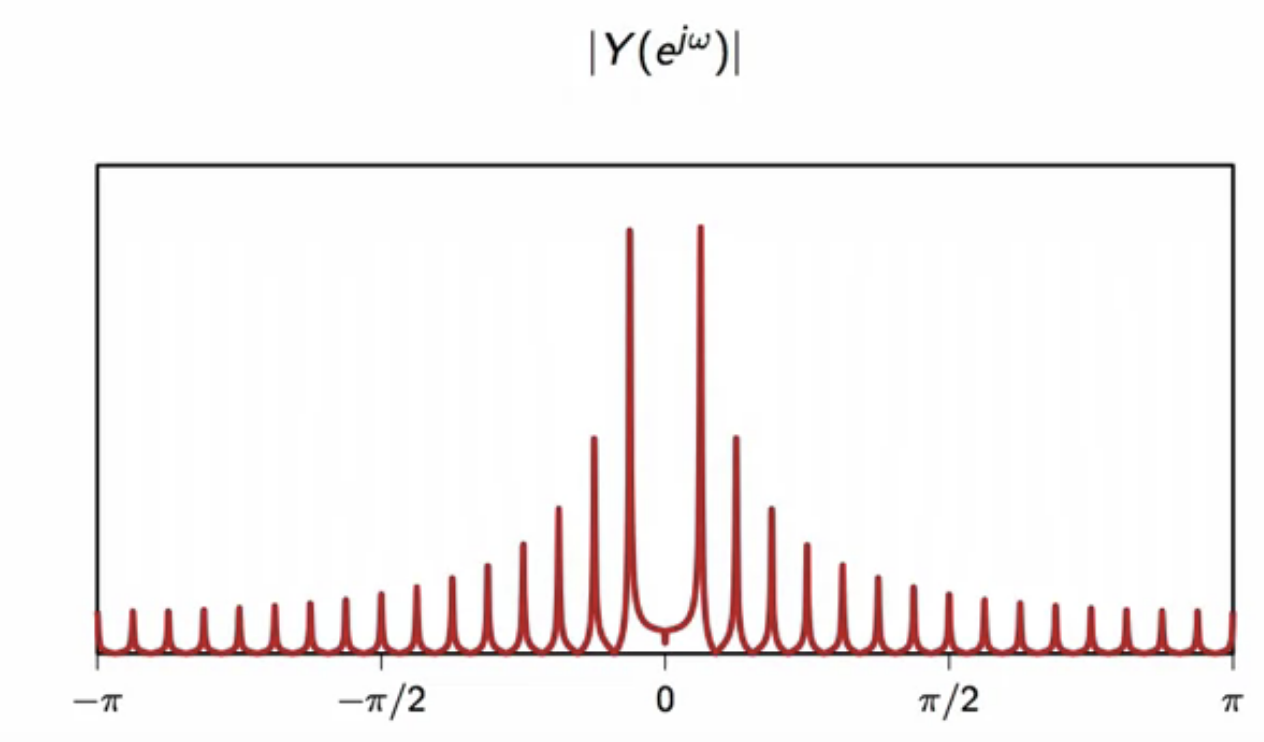
*fig: product of last two DTFT plots same as the karplus-strong fourier transform*