[DSP] W07 - Interpolation
contents
- polynomial interpolation
- local interpolation
- local interpolations schemes
- sinc interpolation
- trade-offs
- interpolation is the process of synthesizing continuous-time world entities from the discrete-time world
- symbolically, \(x(t) \) is obtained, given \( x[n] \)
fig: continuous-time world vs. discrete-time world metaphor
polynomial interpolation
- consider given a discrete sequence of points
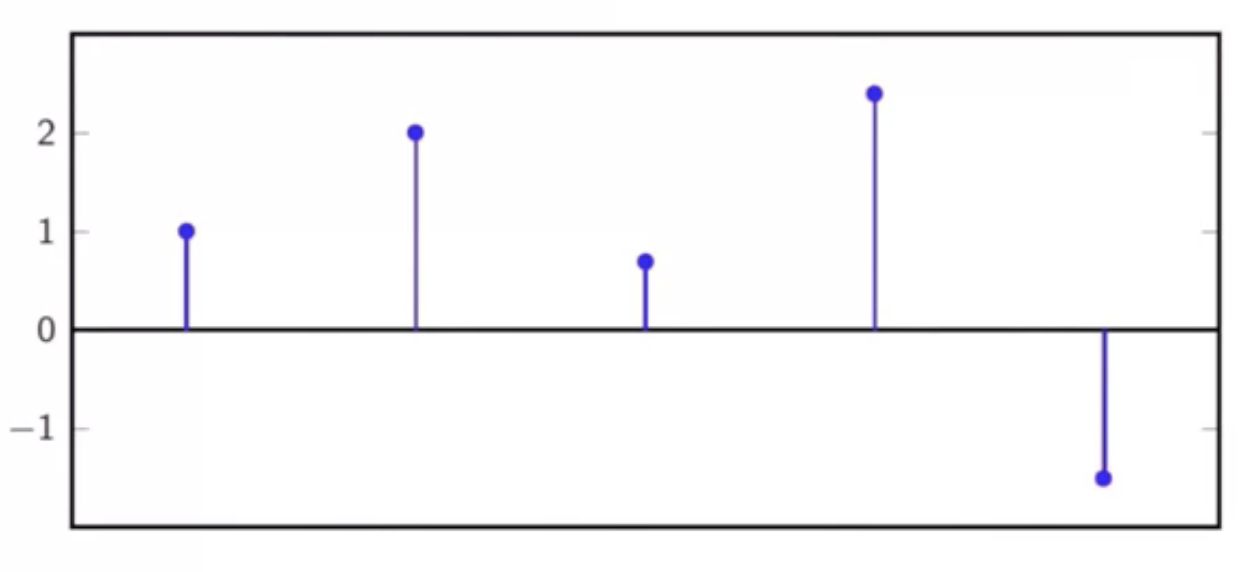
fig: discrete time sequence
- to be determined is a continuous function that goes through all the points
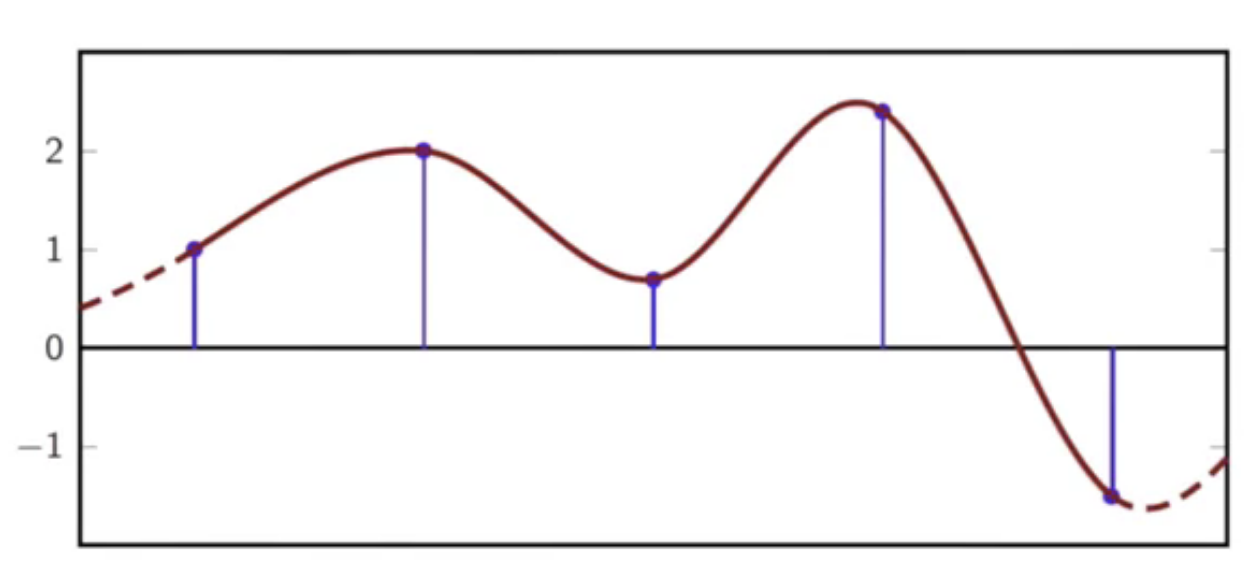
fig: continuous curve fit through discrete time sequence
- this transforms \(x(t) \) to \( x[n] \)
- interpolators are tools to generate curves through points in a localized area
- these are used to generate band-limited continuous-time functions
interpolation requirements
- decide on \(T_s\): spacing between the samples
- make sure \( x(nT_s) = x[n] \)
- \( x(t) \) has to be smooth
smoothness entailment
- smoothness means:
- the interpolation should be infinitely differentiable
- jumps (1st order discontinuities) requires signals to move faster than light
-
2nd order discontinuities requires infinite acceleration
- natural solution: polynomial interpolation
polynomial interpolation
- this is a naive approach for the interpolation problem
- for a discrete signal with \(N\) points
- polynomial of degree \( N-1 \)
- fit the polynomial
- \( p(t) = a_0 + a_1 t + a_2 t^2 + \ldots + a_{N-1}t^{N-1} \)
- here:
\[ \begin{align}
p(0) & = x[0] \
p(T_s) & = x[1] \
p(2T_s) & = x[2] \
\ldots \
p( (N-1) T_s ) & = x[N-1] \
\end{align} \]
lagrange interpolation
- consider a symmetric interval \(I_N = [-N,\ldots, N] \)
- set \(T_s = 1 \)
-
then: \[ \begin{align} p(-N) & = x[-N] \
p(-N + 1) & = x[-N + 1] \
\ldots \
p(0) & = x[0] \
\ldots \
p(N) & = x[N] \
\end{align} \] - \( P_N \): space of degree-\(2N\) polynomials over \(I_N\)
-
a basis for \( P_N \) is the family of \( 2N + 1 \) lagrange polynomials \[ L_n^{(N)}(t) = \prod_{k=-N, k \neq n}^{N} \frac{t-k}{n-k} \
n = -N,\ldots,N \] - pick N = 1 to get three lagrange polynomials
- \( L_{-1}^{(1)}, L_{0}^{(1)}, L_{1}^{(1)} \)
-
calculate each polynomial now:
- \( L_0^{(1)} \):
- \( \prod_{k = -1}^{1} \frac{t-k}{-k} = \frac{t+1}{1}.\frac{t-1}{-1} = 1 - t^2 \)
- this is a parabola
- which is 1 at origin
- 0 at 1 and -1
- similarly,
- \( L_1^{(1)}(t) = \frac{t^2 + t}{2} \)
- \( L_{-1}^{(1)}(t) = \frac{t^2 - t}{2} \)
-
all lagrangian polynomials generated so are 1 at their index \(N\) and 0 at other integers
-
lagrangian interpolator: \[ p(t) = \sum_{n = -N}^{N} x[n]L_n^{(N)}(t) \]
- this interpolation is the sough-after polynomial interpolator
- polynomial of degree \(2N\) through \(2N + 1 \) points in unique
- the lagrangian interpolator satisfies
\[ p(n) = x[n] \
\text{ for } -N \leq n \leq N \
\
\text{ since } \
L_n^{(N)}(m) = \Bigg \{ \begin{matrix} 1 & \text{ if } n = m \\ 0 & \text{ if } n \neq m \end{matrix} \]
example
- given sequence
fig: discrete time sequence
- the lagrange interpolation with \( N = 2 \) is as follows
- this has five lagrange polynomials in all: \( L_{-2}^{(2)}, L_{-1}^{(2)}, L_{0}^{(2)}, L_{1}^{(2)}, L_{2}^{(2)} \)
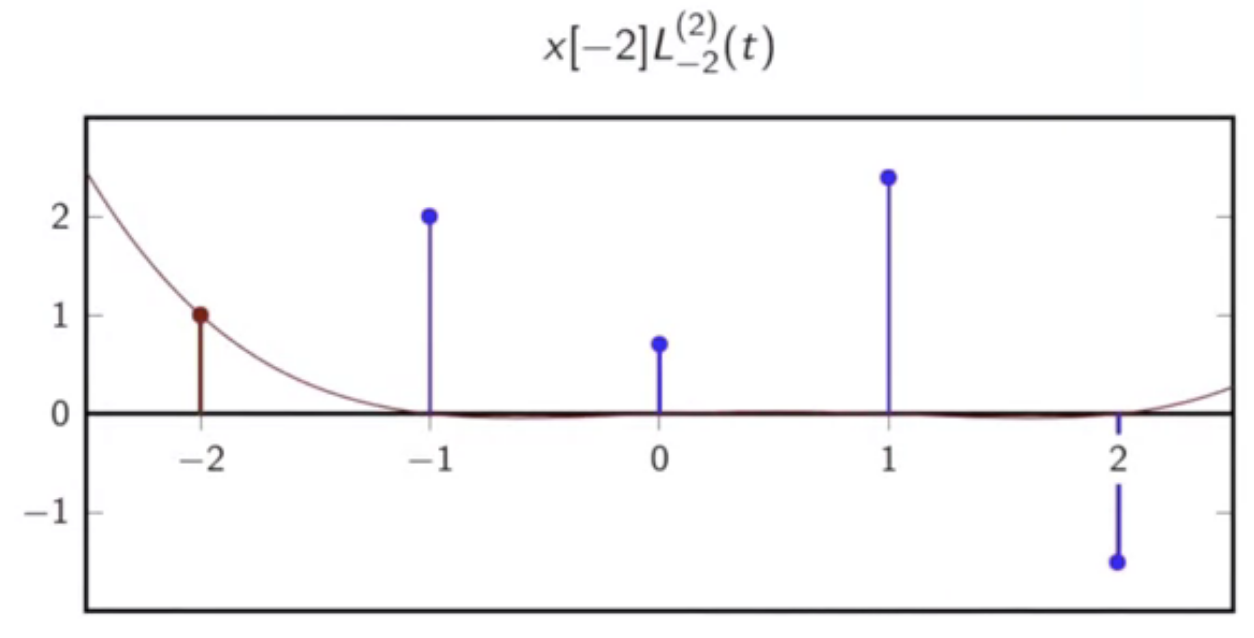
fig: lagrange polynomial [-2]
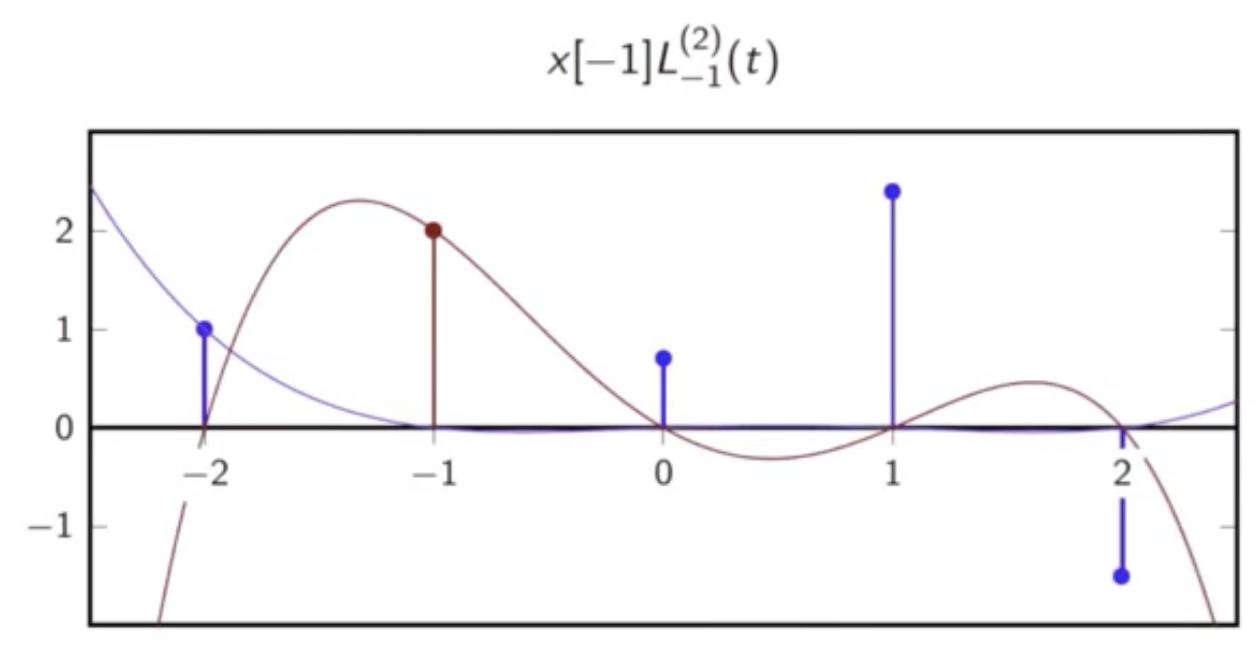
fig: lagrange polynomial [-1]
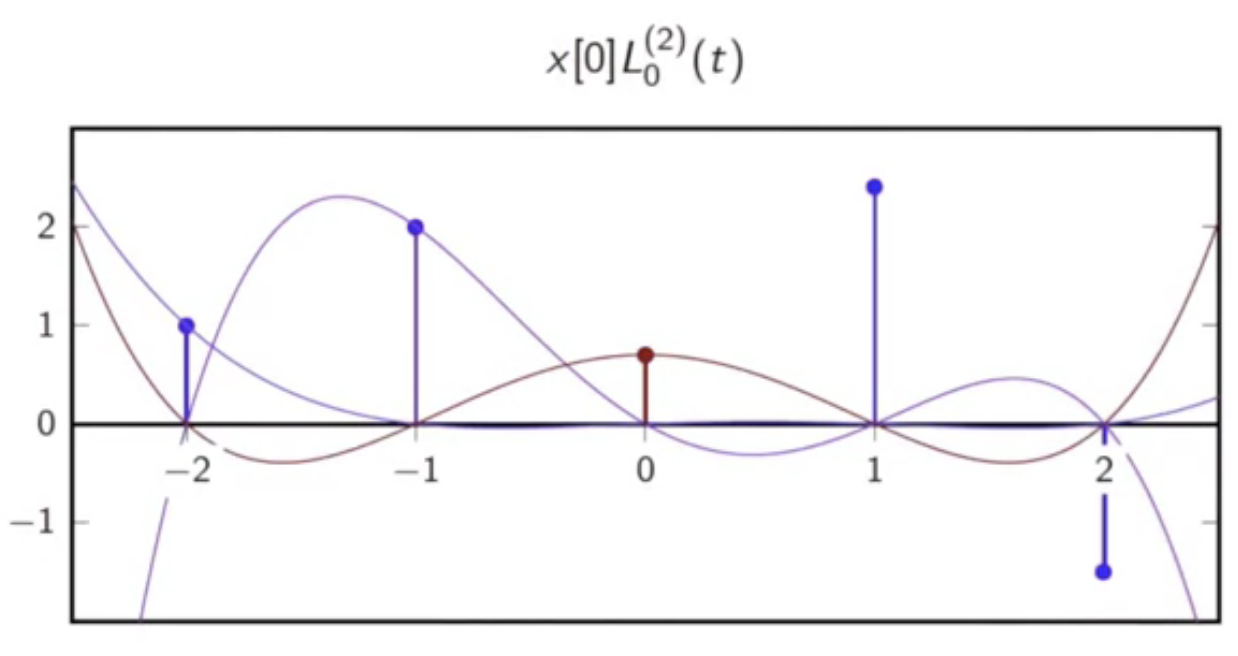
fig: lagrange polynomial [0]
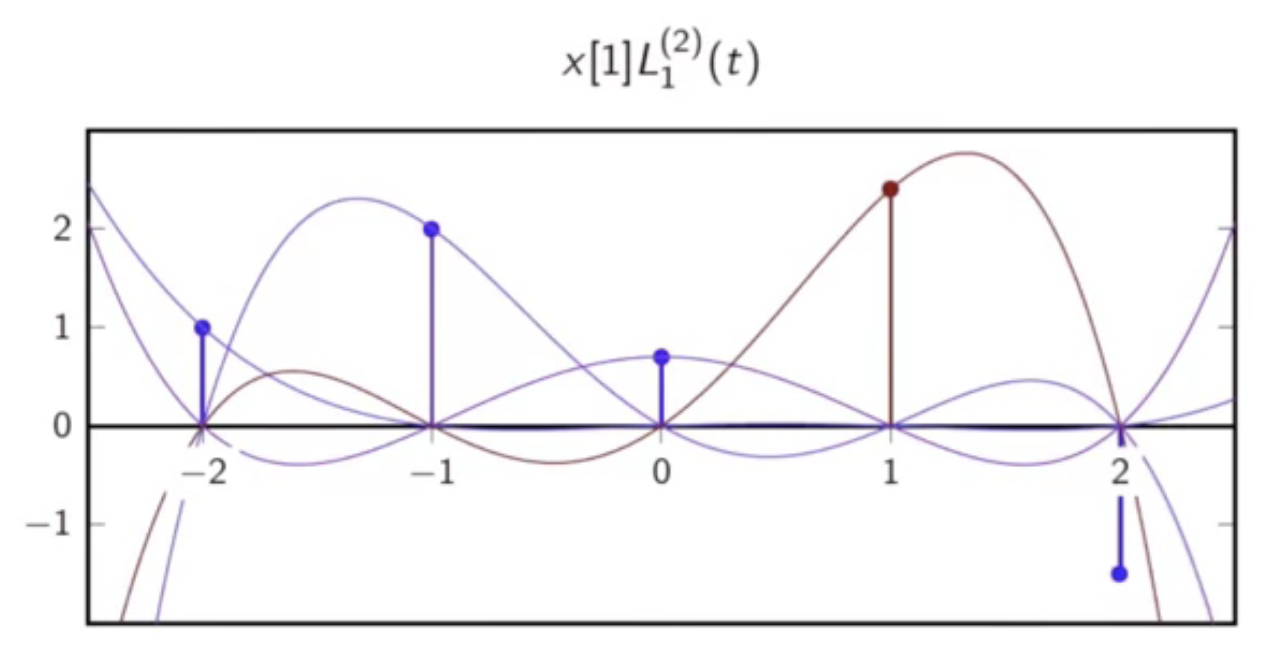
fig: lagrange polynomial [1]
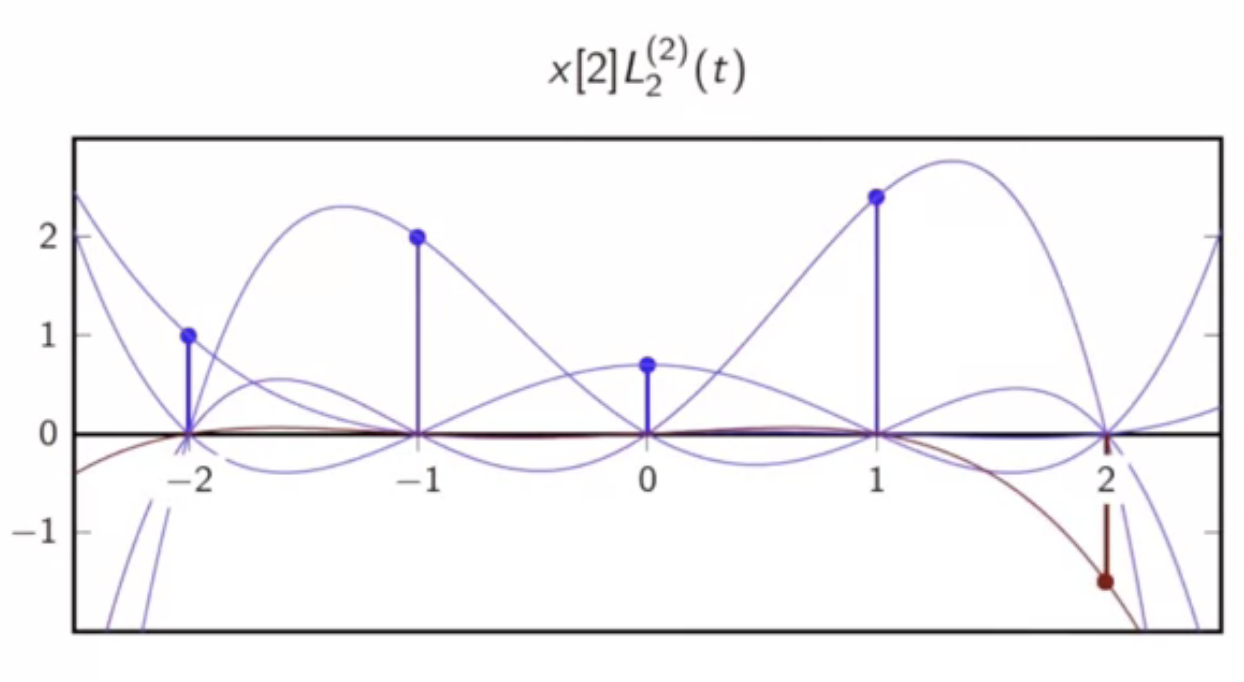
fig: lagrange polynomial [2]
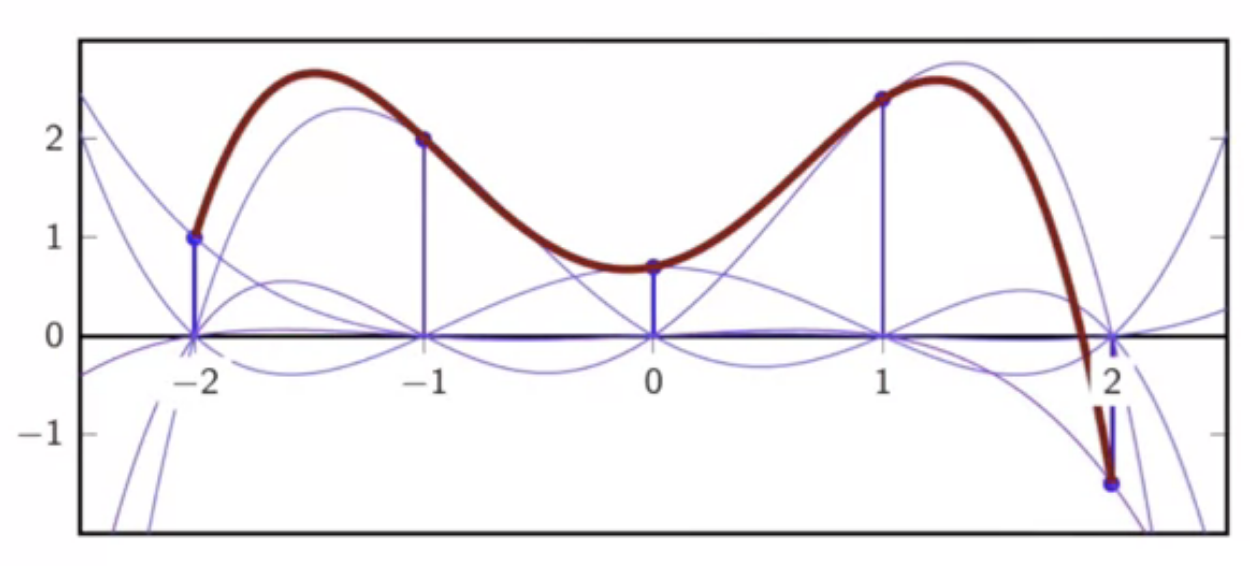
fig: summed lagrange polynomials
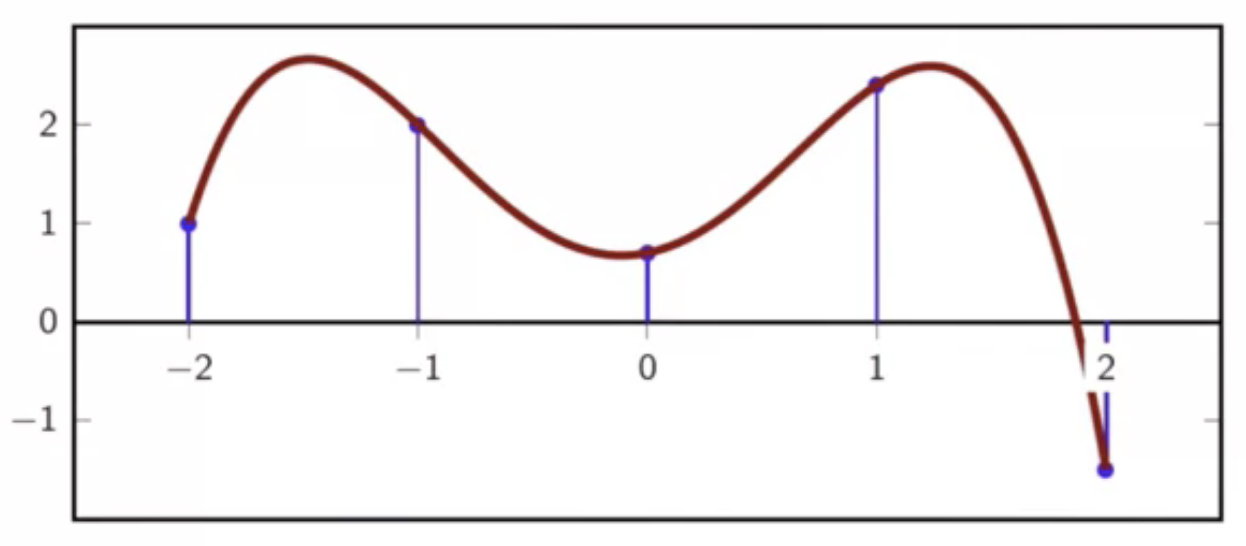
fig: final interpolation to given discrete signal
lagrange polynomial notes
- maximally smooth
-
infinitely many continuous derivatives
- interpolation bricks shape depend on chosen \(N\)
- each brick looks different
local interpolation
- other interpolation possibilities essentially have to meet the same requirements
- decide on \(T_s\)
- make sure \( x(nT_s) = x[n] \)
- \( x(t) \) has to be smooth
- smoothness condition of being infinitely many times differential is too stringent for practical applications
-
signal has to hold smoothness within the limits of the system
- consider the following sequence in discrete-time
fig: discrete time sequence
- explored in the following are some interpolation strategies
zero-order interpolation
- piecewise constant function
- a staircase function
- matches discrete sequence value at given locations
- but is not continuous
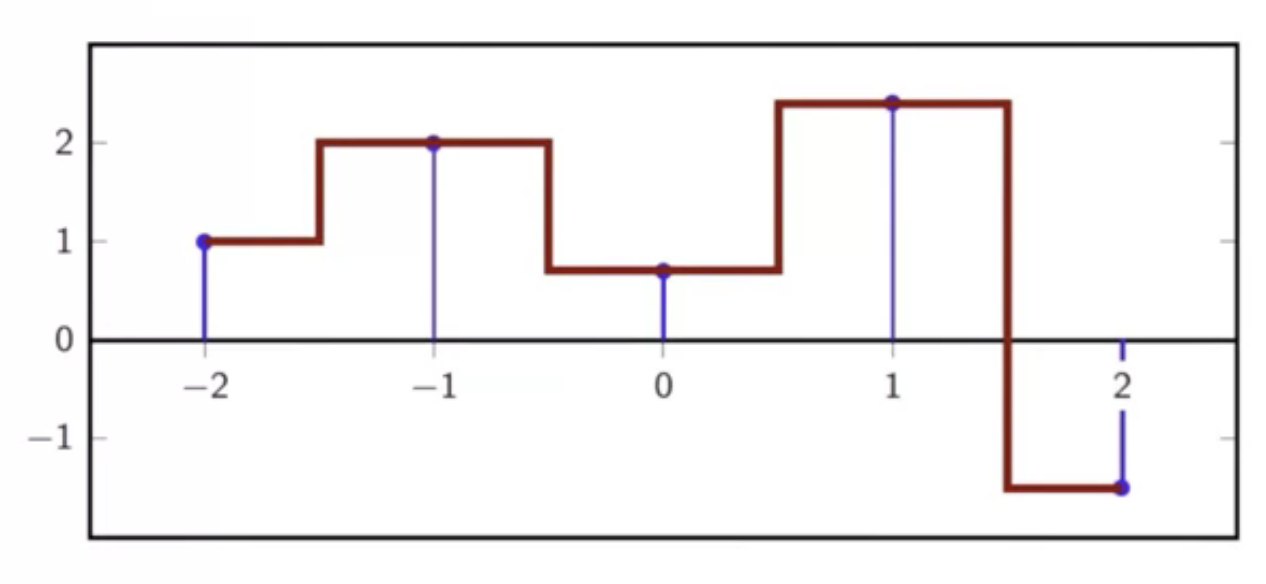
fig: piecewise interpolation for a discrete time sequence
characteristics
- \(x(t) = x[ \lfloor t + 0.5 \rfloor ] \)
- \( -N \leq t \leq N \)
\[ x(t) = \sum_{n = -N}^{N} x[n] rect(t-n) \]
- interpolation kernel: \( i_0(t) = rect(t) \)
- \( i_0(t) \): “zero-order hold”
- interpolator’s support is 1
- interpolation is not continuous
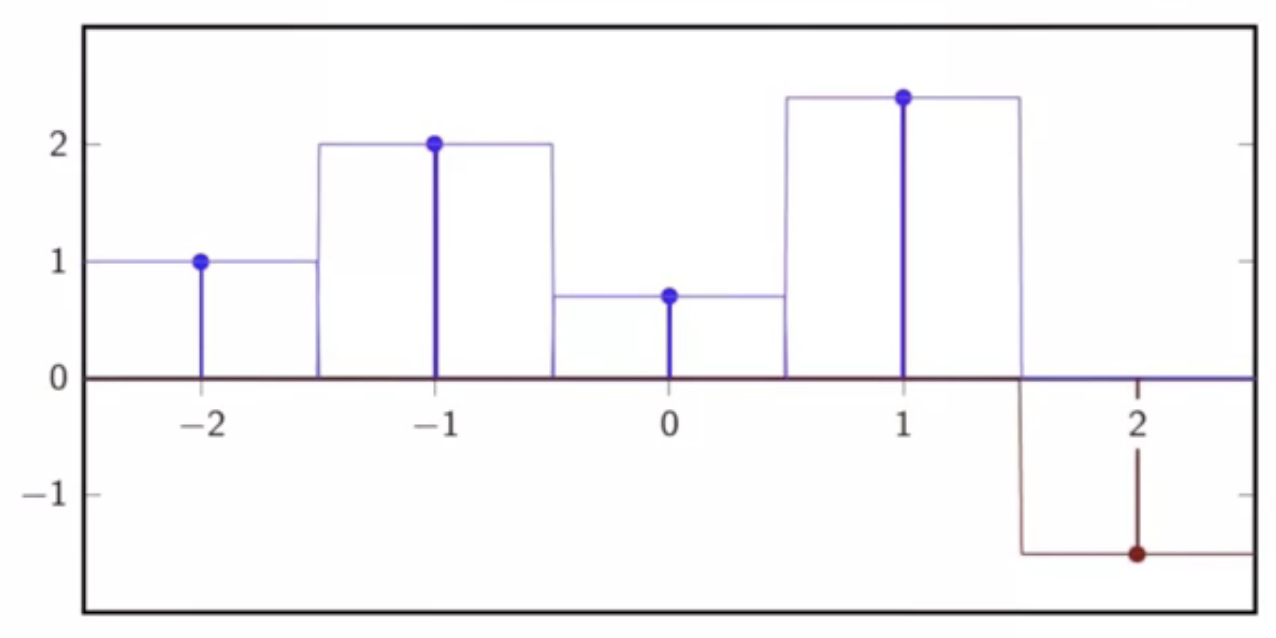
fig: zero-order interpolation - rects for a discrete time sequence
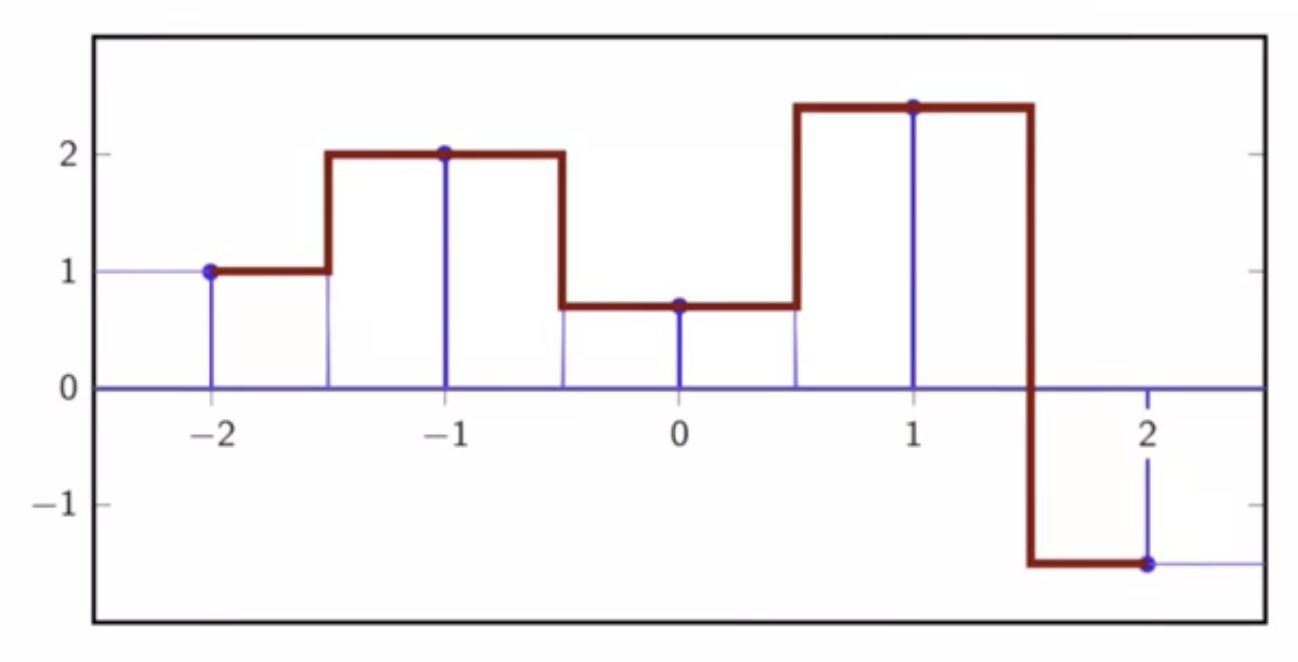
fig: sum of piecewise rect supports
first-order interpolation
- piece-wise linear function
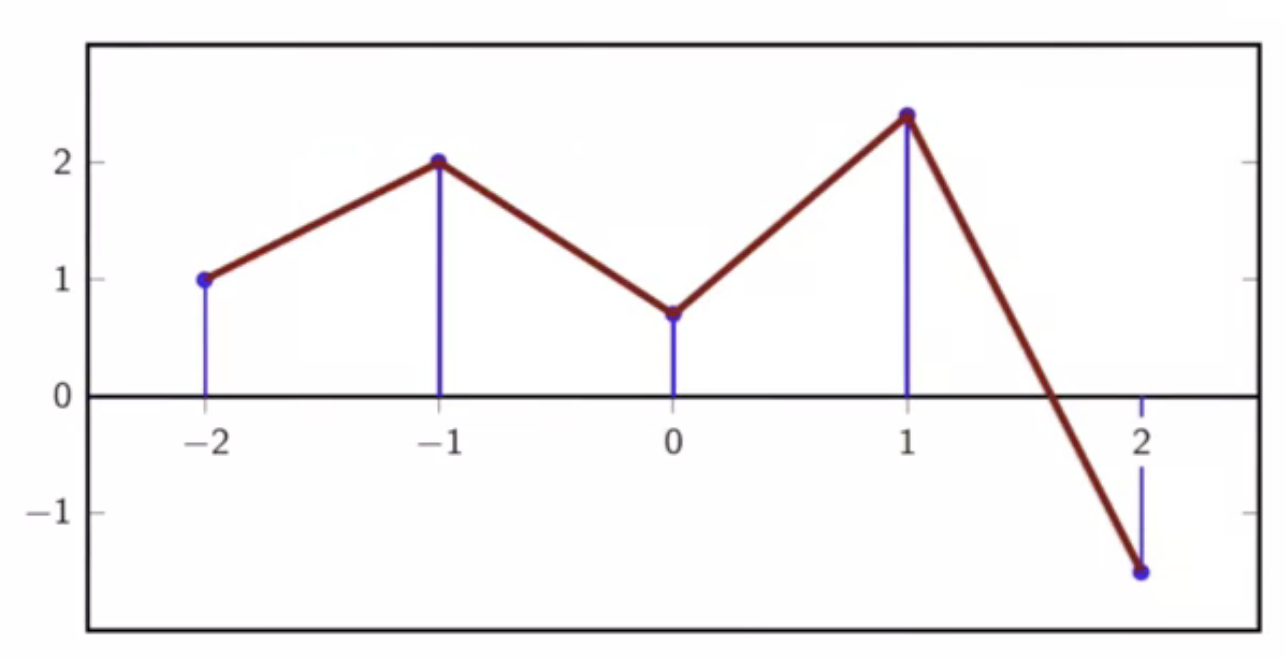
fig: first-order interpolation for a discrete time sequence
- straight lines connect the samples
- connect the dots strategy
characteristics
\[ x(t) = \sum_{n = -N}^{N} x[n] i_1(t-n) \]
- interpolation kernel: \[ i_1(t) = \Bigg \{ \begin{matrix} 1 - \vert t \vert & \vert t \vert \leq 1 \\ 0 & \text{ otherwise }\end{matrix} \]
- interpolator support is 2
- interpolation is continuous
- however its derivative is not
- the interpolation function has inflections at the discrete sample points
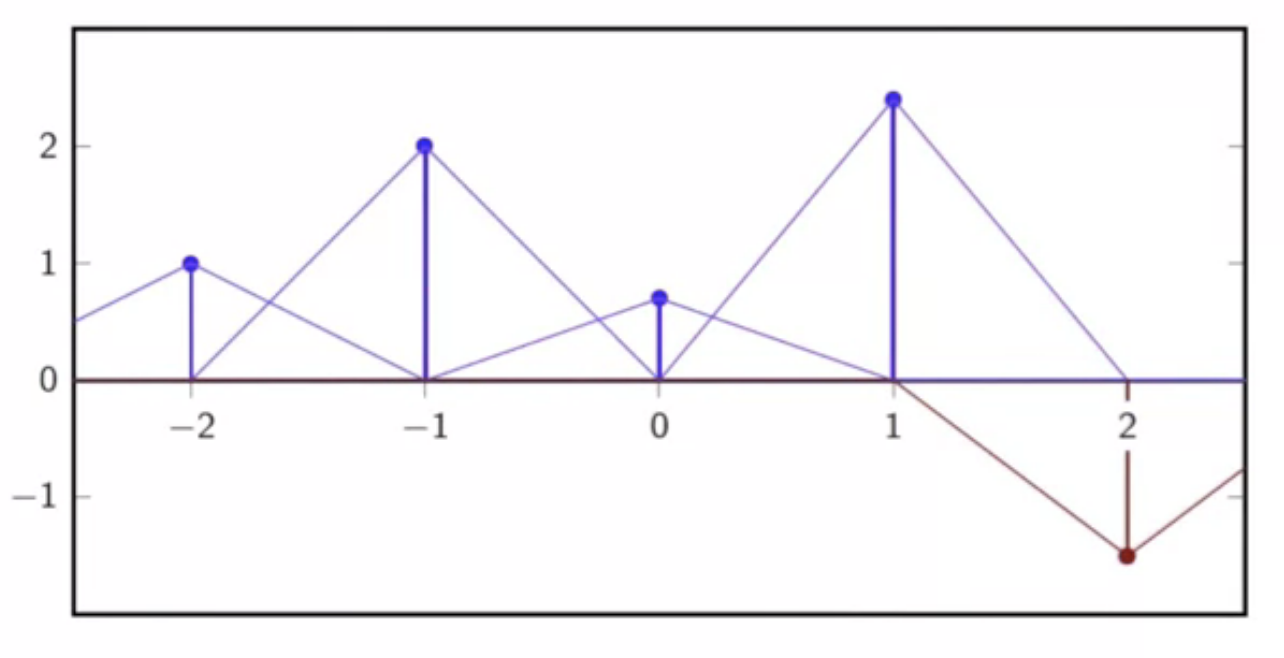
fig: first-order interpolation - support functions through discrete sequence
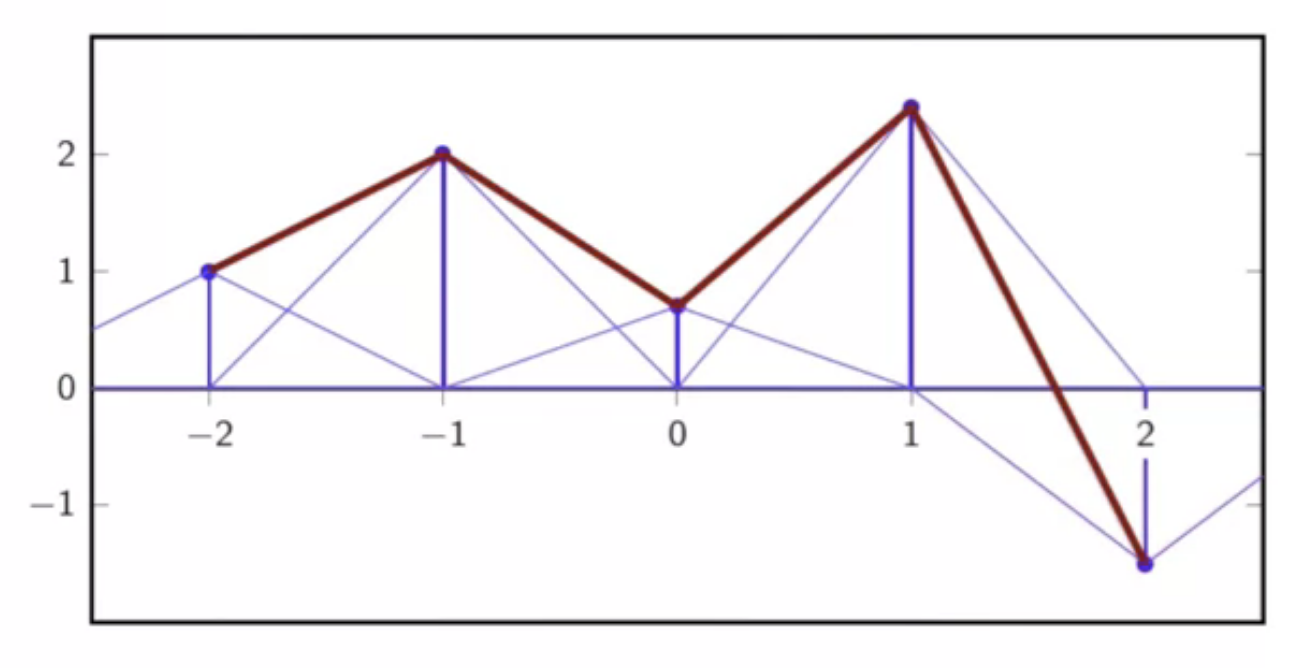
fig: first-order interpolation - sum of support functions
third-order interpolation
characteristics
\[ x(t) = \sum_{n = -N}^{N} x[n] i_3(t-n) \]
- interpolation kernel is put together from two cubic polynomials
- interpolator support is 4
- interpolation is continuous up to second derivative
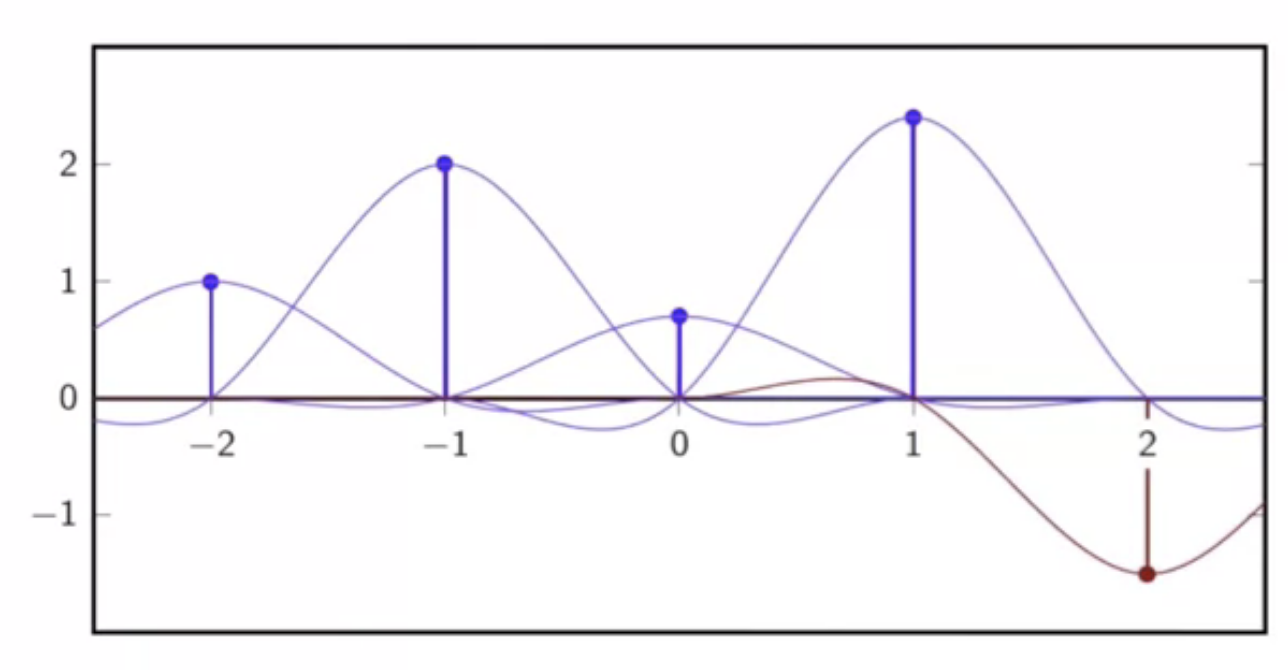
fig: third-order interpolation - support functions through discrete sequence
fig: third-order interpolation - sum of support functions
local interpolations schemes
\[ x(t) = \sum_{n = -N}^{N} x[n] i_c(t-n) \]
- interpolator’s requirements:
- \( i_c(0) = 1 \)
- \( i_c(t) = \) for \(t\) a nonzero integer
- different interpolator kernels may be used with the interpolator
three kernels
- box kernel
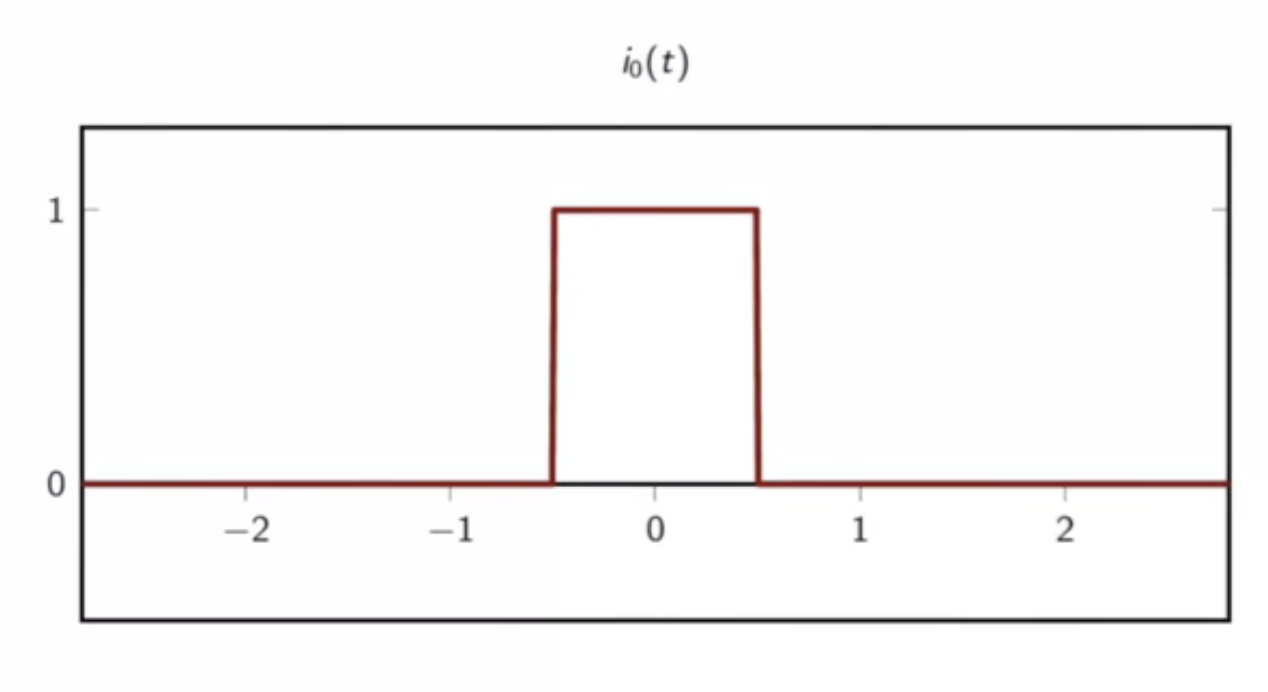
fig: box interpolator kernel
- triangle kernel
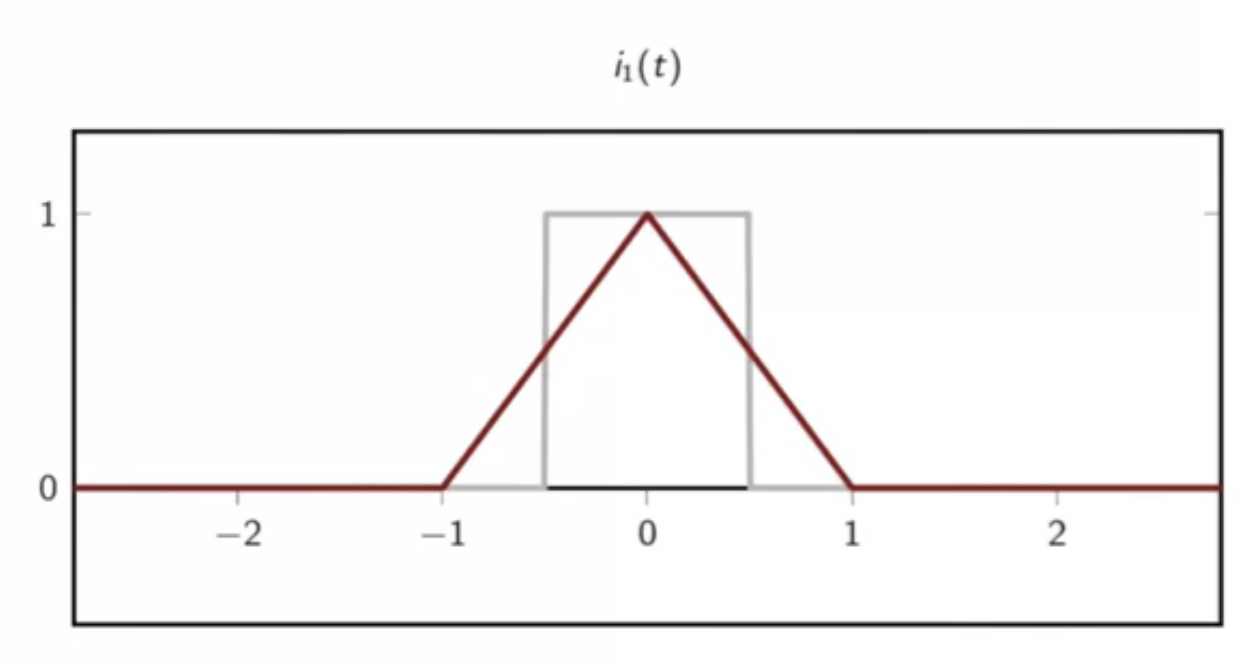
fig: triangle interpolator kernel
- cubic kernel
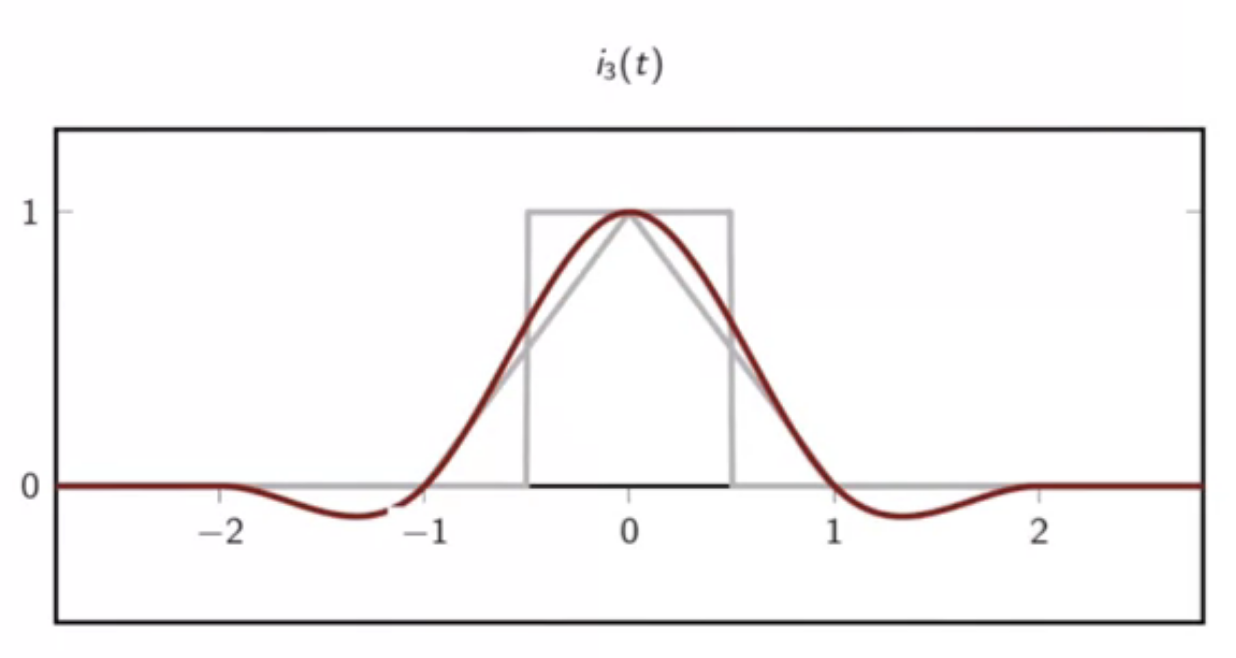
fig: cubic interpolator kernel
properties
- they become larger and smoother as the order increases
- same interpolating function independent of \(N\)
- in contrast with the lagrange interpolation
- lack of smoothness
- compared to the lagrange interpolation
sinc interpolation
\[ x(t) = \sum_{n = -\infty}^{\infty} x[n] sinc \bigg( \frac{t - nT_s}{T_s} \bigg) \]
example
- consider a discrete-time sequence
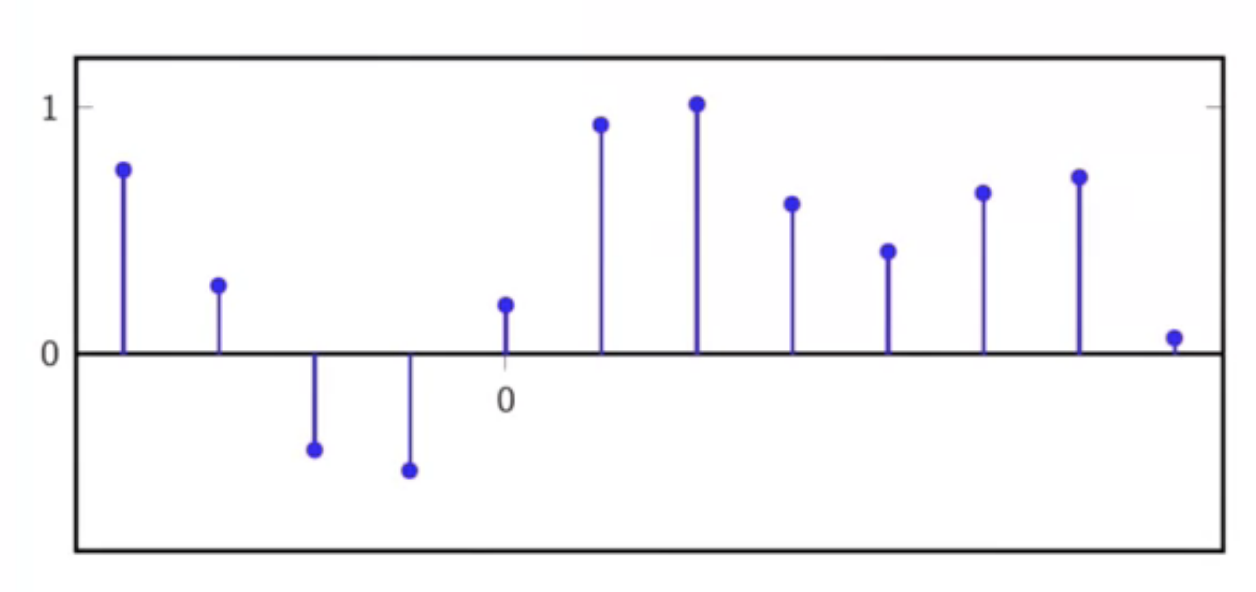
fig: discrete-time sequence to be interpolated
- overlaying the interpolator kernels over appropriate sequence points
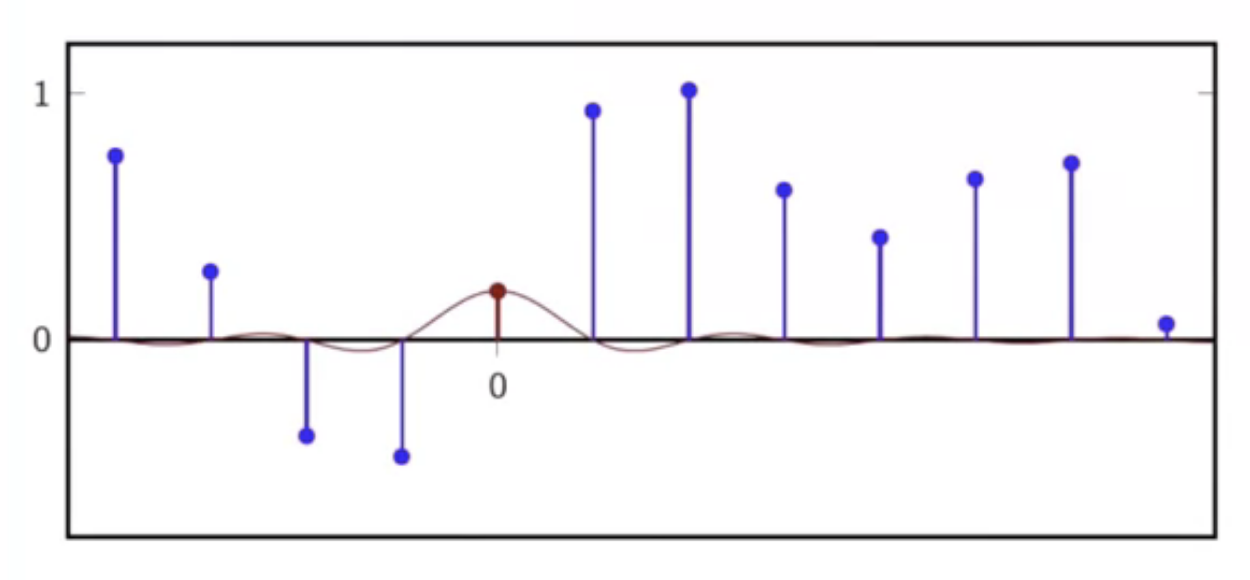
fig: one kernel, at origin
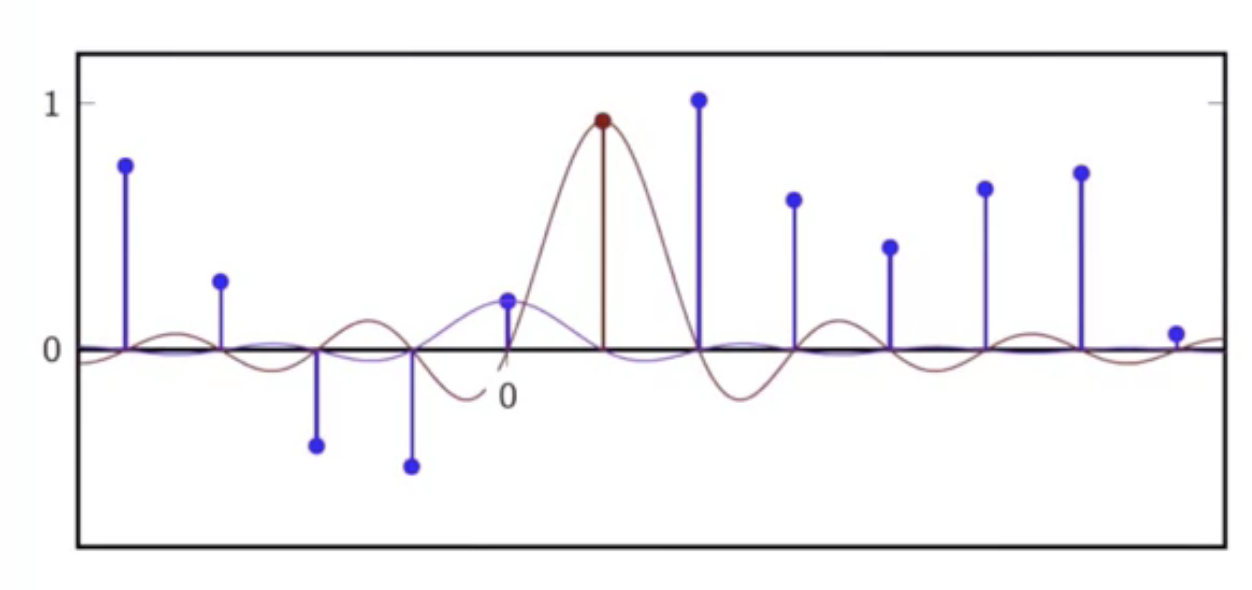
fig: second kernel added
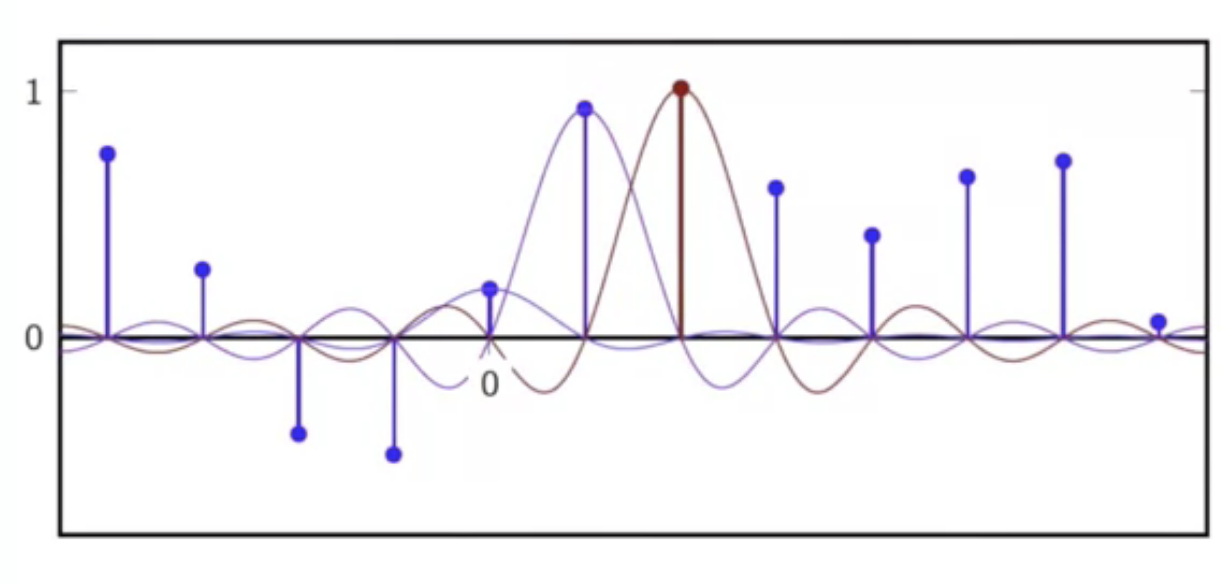
fig: more kernels added
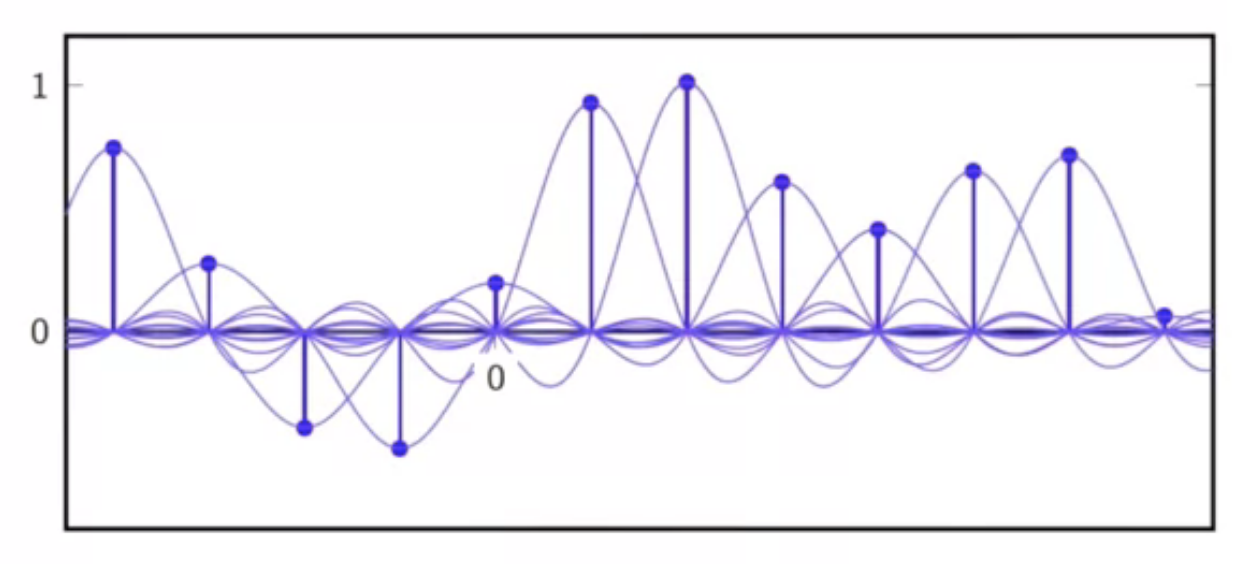
fig: all discrete samples fitted with corresponding kernels
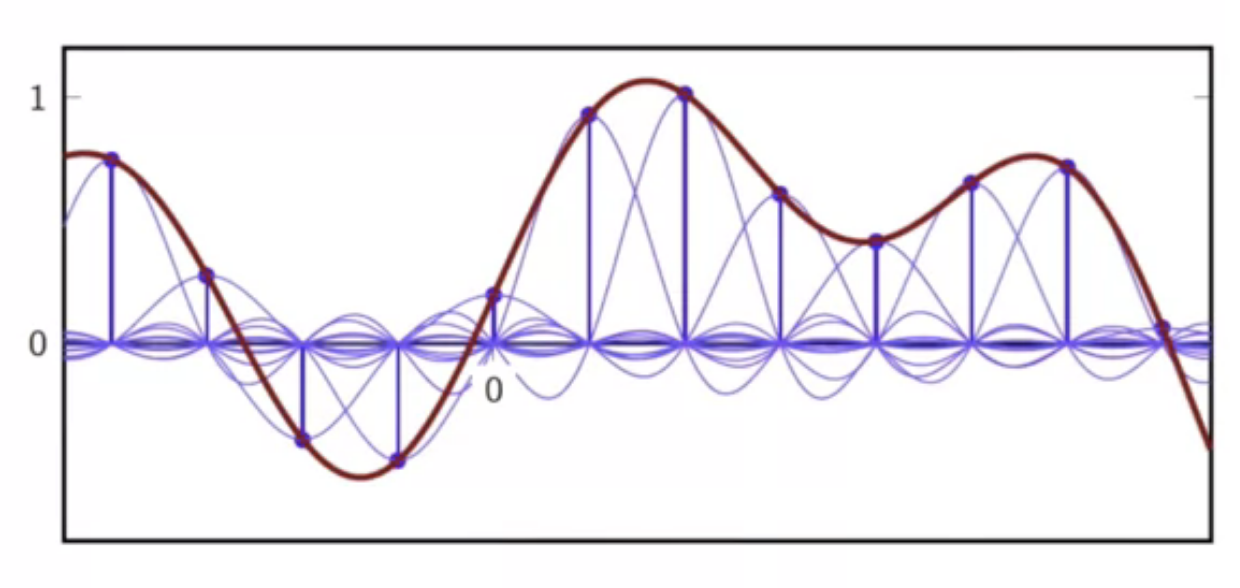
fig: sum of support kernels
lagrange-sinc interpolation relationship
- lagrange-sinc interpolation relationship \[ \lim_{N \rightarrow \infty} L_n^{(N)} = sinc(t-n) \]
- within the system limit, local and global interpolation are the same
- lagrange interpolation: global
- sinc interpolation: local
proof
- proof is too technical (see textbook)
- intuition: \(sinc(t-n) \) and \( L_n^{(\infty)}(t) \) share infinite number of zeros
\[ \begin{align}
sinc(m-n) & = \delta[m-n]
\\ & m,n \in \mathbb{Z} \
\
L_n^{(N)}(m) & = \delta[m-n] \
& m,n \in \mathbb{Z}, \\
& -N \leq n,m \leq N \
\end{align}
\]
visualization
- below are comparisons of sinc and higher order lagrange function interpolation
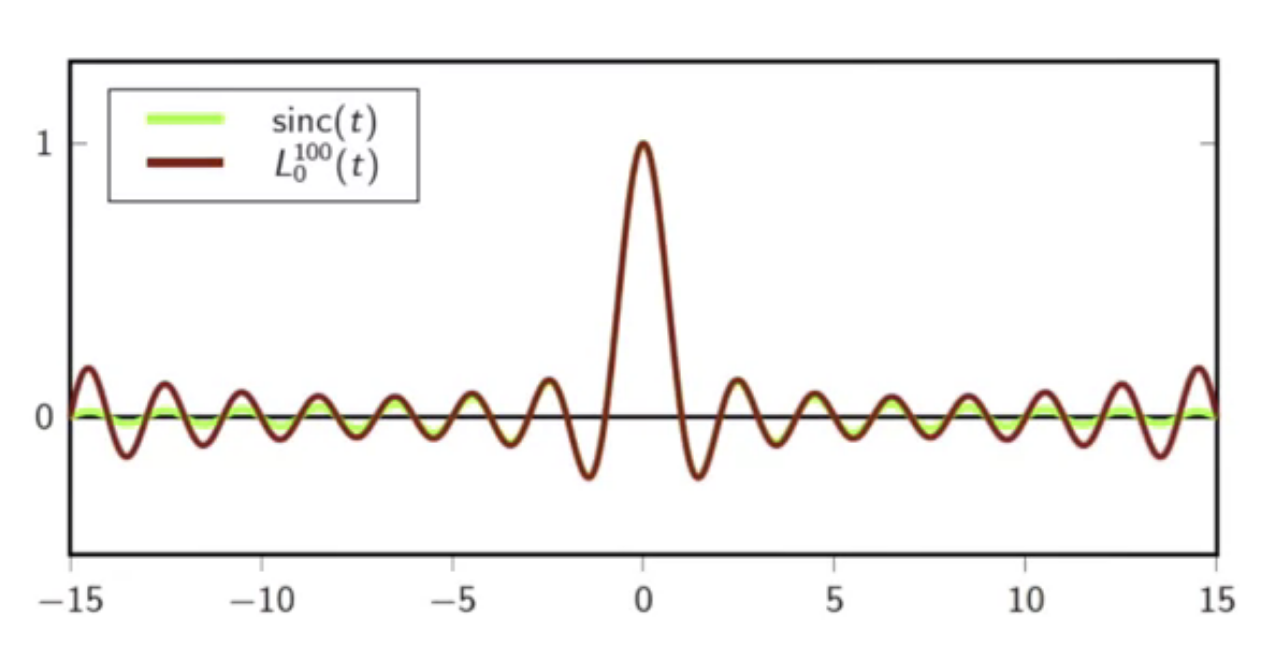
fig: sinc and 100-order lagrange interpolator
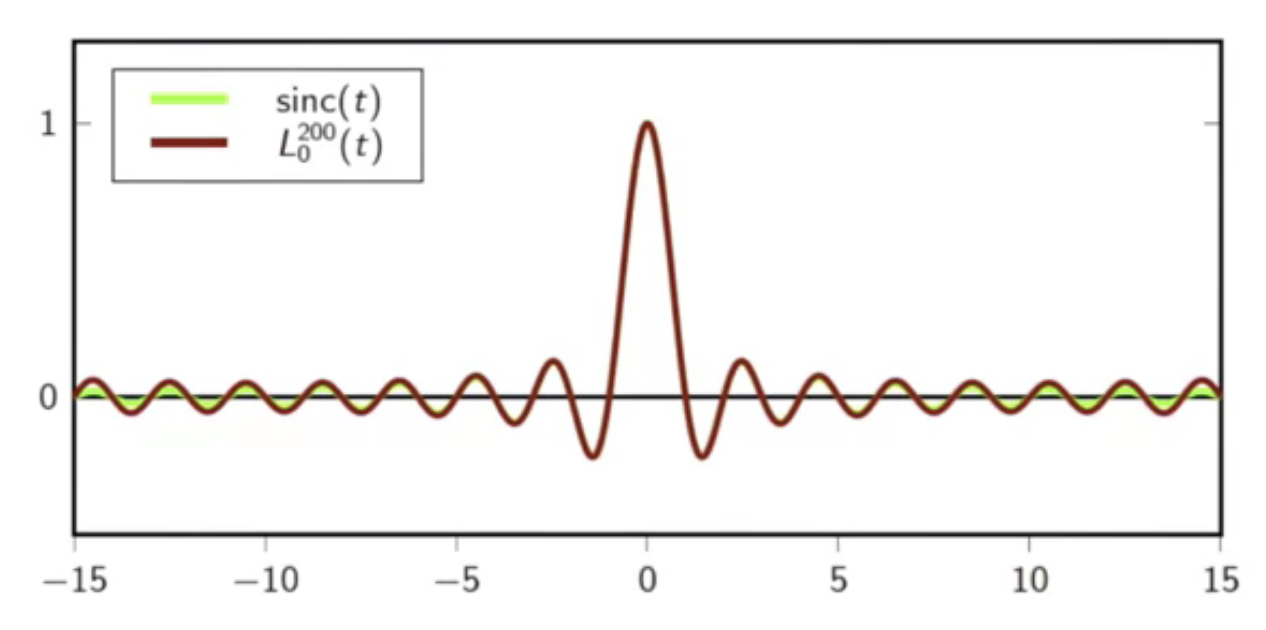
fig: sinc and 200-order lagrange interpolator
fig: sinc and 300-order lagrange interpolator
trade-offs
- lagrange interpolation is maximally smooth
- but has the drawback that the interpolation kernel depends on N.
- to avoid lagrange interpolation drawback, another interpolation called local interpolation is used
- method uses only a neighborhood of 2N+1 points and
- an interpolation kernel over these 2N+1 points that is equal to 1 at zero and 0 at nonzero integer points
-
the interpolation kernel does not depends on N but some of the smoothness is lost in the process
- as N goes to infinity, the lagrange interpolation corresponds to a sinc interpolation
- at the limit, global and local interpolation are equivalent